Robotics Software
Modern robots are complex computer systems involving enormous amounts of software to handle everything from drivers to communicate to physical interfaces, middleware to communicate between disparate processes, and machine learning kernels to process incoming data to make decisions in real-time. Robots’ unique challenges (heterogeneous hardware, programmed and learned components, handling physical environments, emergent behavior in the real world, etc.) merit special consideration from the software used by practitioners and researchers. Developing software components, libraries, and robot systems requires understanding and shaping code around these distinguishing use cases.
2025
- OCEANS
 Underwater Multi-Robot Simulation and Motion Planning in AnglerIn IEEE/MTS OCEANS Conference
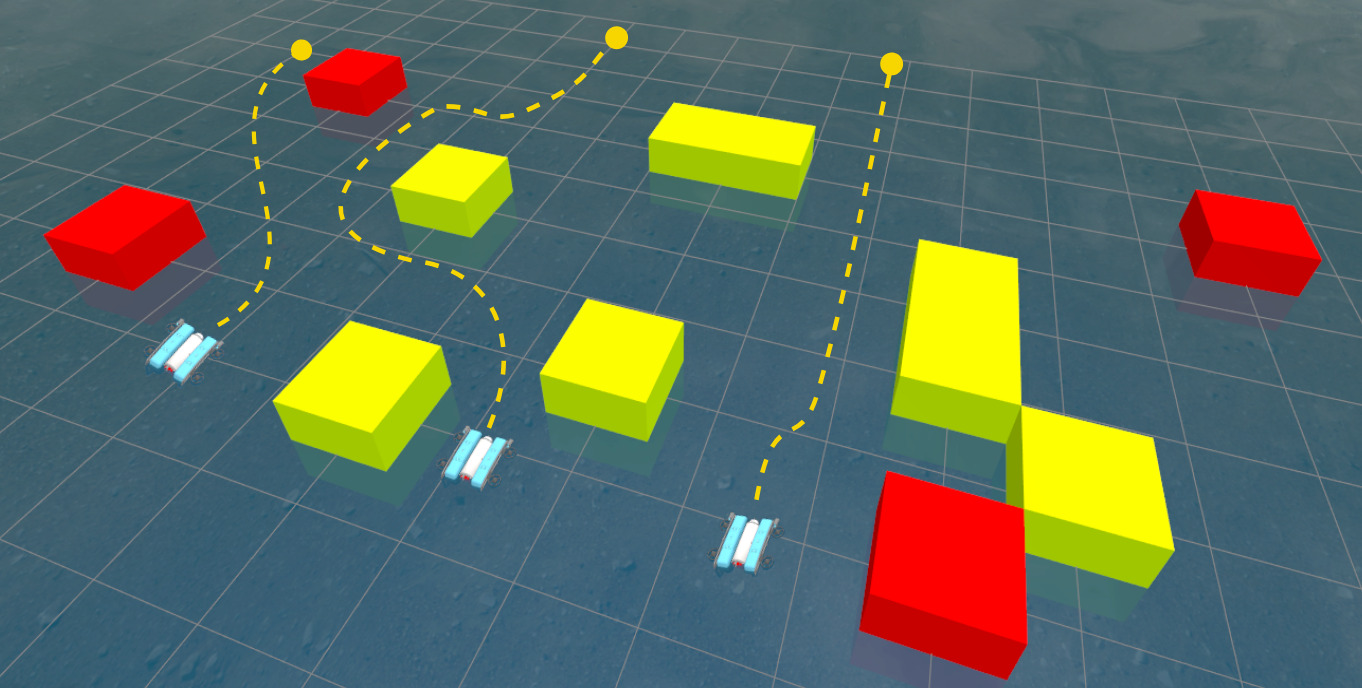
Underwater Multi-Robot Simulation and Motion Planning in AnglerIn IEEE/MTS OCEANS ConferenceDeploying multi-robot systems in underwater environments is expensive and lengthy; testing algorithms and software in simulation improves development by decoupling software and hardware. However, this requires a simulation framework that closely resembles the real-world. Angler is an open-source framework that simulates low-level communication protocols for an onboard autopilot, such as ArduSub, providing a framework that is close to reality, but unfortunately lacking support for simulating multiple robots. We present an extension to Angler that supports multi-robot simulation and motion planning. Our extension has a modular architecture that creates non-conflicting communication channels between Gazebo, ArduSub Software-in-the-Loop (SITL), and MAVROS to operate multiple robots simultaneously in the same environment. Our multi-robot motion planning module interfaces with cascaded controllers via a JointTrajectory controller in ROS 2. We also provide an integration with the Open Motion Planning Library (OMPL), a collision avoidance module, and tools for procedural environment generation. Our work enables the development and benchmarking of underwater multi-robot motion planning in dynamic environments.
@inproceedings{agrawal2025mrangler, title = {Underwater Multi-Robot Simulation and Motion Planning in Angler}, author = {Agrawal, Akshaya and Palmer, Evan and Kingston, Zachary and Hollinger, Geoffrey A.}, booktitle = {IEEE/MTS OCEANS Conference}, pages = {1--6}, year = {2025}, doi = {10.1109/OCEANS58557.2025.11104649}, address = {Brest, France}, } - RoboSoft
 Physics-Grounded Differentiable Simulation for Soft Growing RobotsLucas Chen*, Yitian Gao*, Sicheng Wang, Francesco Fuentes, Laura H. Blumenschein, and Zachary KingstonIn IEEE-RAS International Conference on Soft Robotics
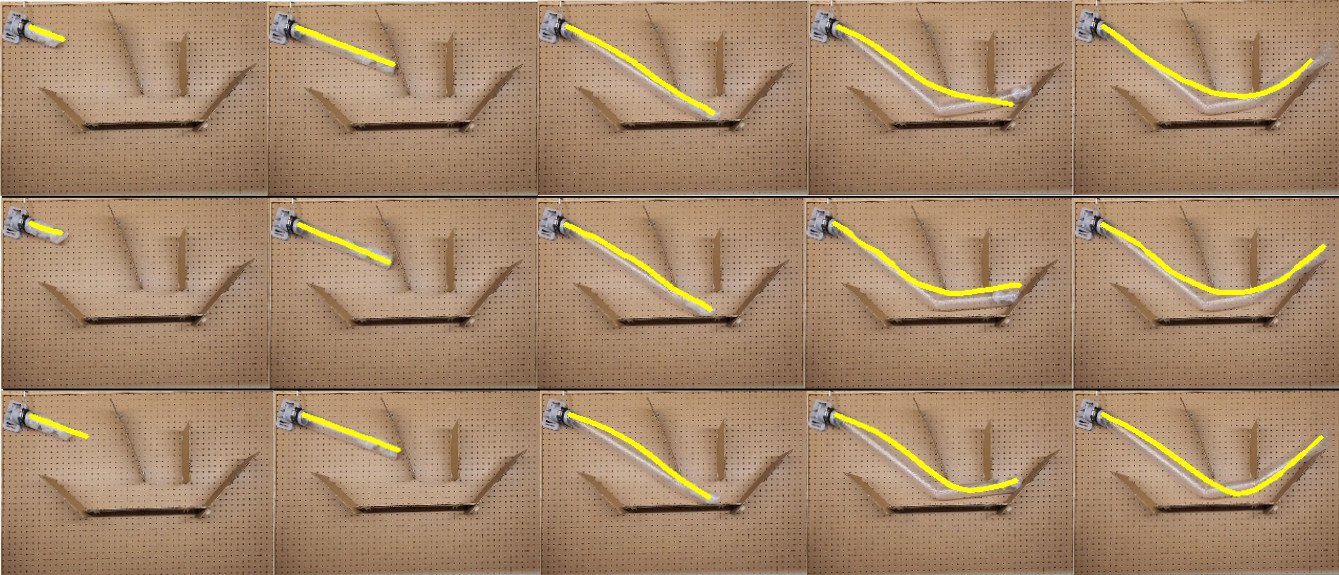
Physics-Grounded Differentiable Simulation for Soft Growing RobotsLucas Chen*, Yitian Gao*, Sicheng Wang, Francesco Fuentes, Laura H. Blumenschein, and Zachary KingstonIn IEEE-RAS International Conference on Soft RoboticsSoft-growing robots (i.e., vine robots) are a promising class of soft robots that allow for navigation and growth in tightly confined environments. However, these robots remain challenging to model and control due to the complex interplay of the inflated structure and inextensible materials, which leads to obstacles for autonomous operation and design optimization. Although there exist simulators for these systems that have achieved qualitative and quantitative success in matching high-level behavior, they still often fail to capture realistic vine robot shapes using simplified parameter models and have difficulties in high-throughput simulation necessary for planning and parameter optimization. We propose a differentiable simulator for these systems, enabling the use of the simulator "in-the-loop" of gradient-based optimization approaches to address the issues listed above. With the more complex parameter fitting made possible by this approach, we experimentally validate and integrate a closed-form nonlinear stiffness model for thin-walled inflated tubes based on a first-principles approach to local material wrinkling. Our simulator also takes advantage of data-parallel operations by leveraging existing differentiable computation frameworks, allowing multiple simultaneous rollouts. We demonstrate the feasibility of using a physics-grounded nonlinear stiffness model within our simulator, and how it can be an effective tool in sim-to-real transfer. We provide our implementation open source.
@inproceedings{chengao2025diffsim, title = {Physics-Grounded Differentiable Simulation for Soft Growing Robots}, author = {Chen, Lucas and Gao, Yitian and Wang, Sicheng and Fuentes, Francesco and Blumenschein, Laura H. and Kingston, Zachary}, booktitle = {IEEE-RAS International Conference on Soft Robotics}, pages = {1--8}, year = {2025}, doi = {10.1109/RoboSoft63089.2025.11020809}, } - arXiv
 HJCD-IK: GPU-Accelerated Inverse Kinematics through Batched Hybrid Jacobian Coordinate Descent
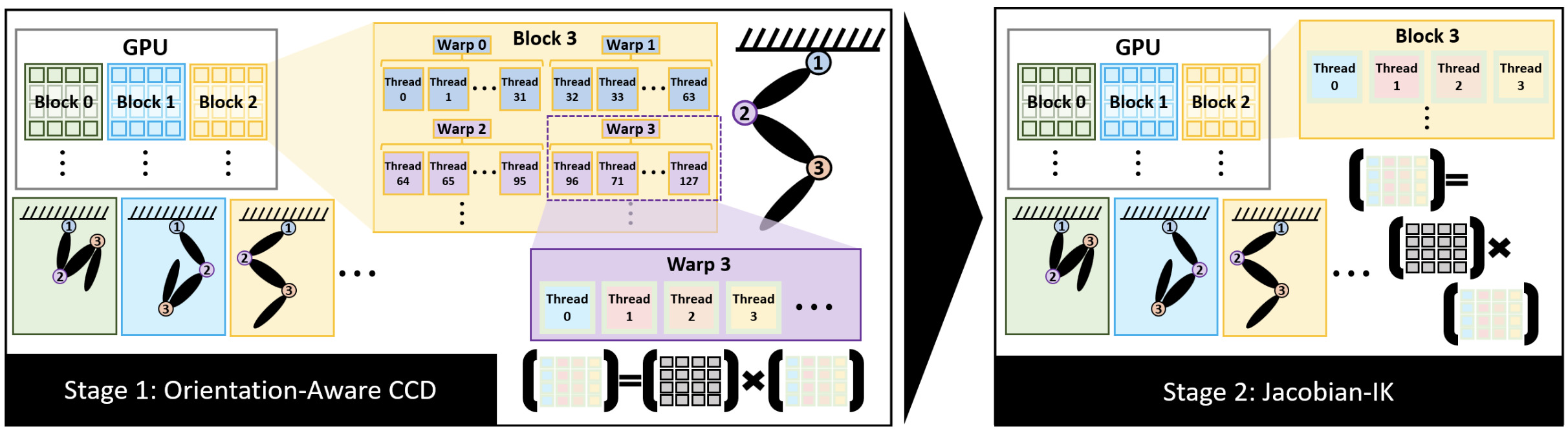
HJCD-IK: GPU-Accelerated Inverse Kinematics through Batched Hybrid Jacobian Coordinate DescentInverse Kinematics (IK) is a core problem in robotics, in which joint configurations are found to achieve a desired end-effector pose. Although analytical solvers are fast and efficient, they are limited to systems with low degrees-of-freedom and specific topological structures. Numerical optimization-based approaches are more general, but suffer from high computational costs and frequent convergence to spurious local minima. Recent efforts have explored the use of GPUs to combine sampling and optimization to enhance both the accuracy and speed of IK solvers. We build on this recent literature and introduce HJCD-IK, a GPU-accelerated, sampling-based hybrid solver that combines an orientation-aware greedy coordinate descent initialization scheme with a Jacobian-based polishing routine. This design enables our solver to improve both convergence speed and overall accuracy as compared to the state-of-the-art, consistently finding solutions along the accuracy-latency Pareto frontier and often achieving order-of-magnitude gains. In addition, our method produces a broad distribution of high-quality samples, yielding the lowest maximum mean discrepancy. We release our code open-source for the benefit of the community.
@misc{yasutake2025hjcdik, title = {{HJCD-IK}: {GPU}-Accelerated Inverse Kinematics through Batched Hybrid Jacobian Coordinate Descent}, author = {Yasutake, Cael and Kingston, Zachary and Plancher, Brian}, eprint = {2510.07514}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, year = {2025}, } - arXiv
 Foam: A Tool for Spherical Approximation of Robot Geometry
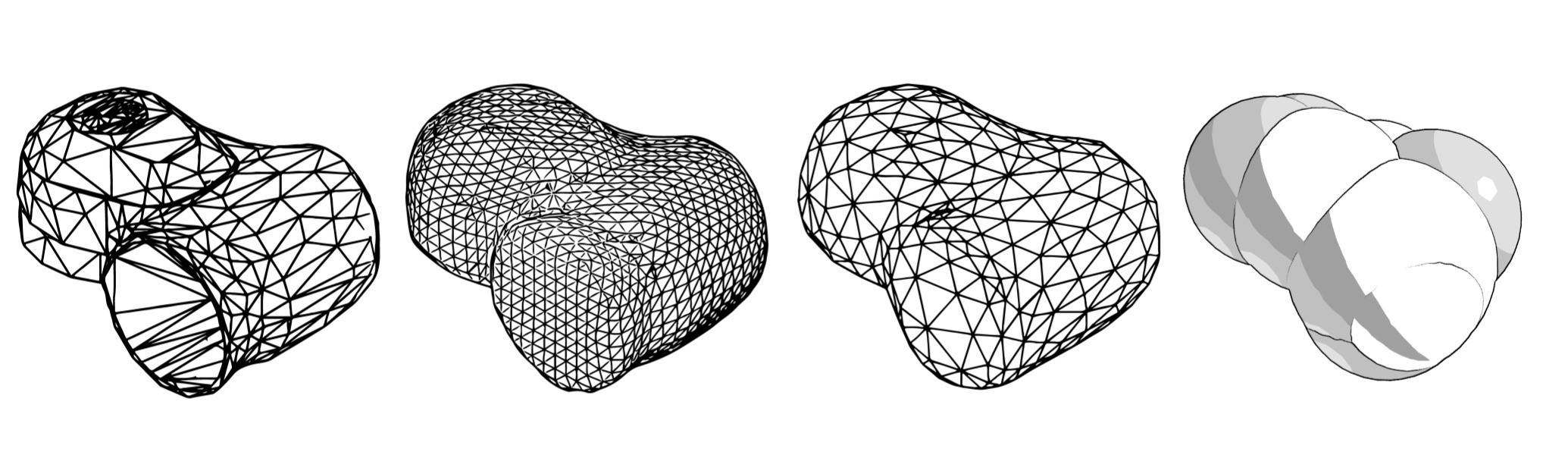
Foam: A Tool for Spherical Approximation of Robot GeometryMany applications in robotics require primitive spherical geometry, especially in cases where efficient distance queries are necessary. Manual creation of spherical models is time-consuming and prone to errors. This paper presents Foam, a tool to generate spherical approximations of robot geometry from an input Universal Robot Description Format (URDF) file. Foam provides a robust preprocessing pipeline to handle mesh defects and a number of configuration parameters to control the level and approximation of the spherization, and generates an output URDF with collision geometry specified only by spheres. We demonstrate Foam on a number of standard robot models on common tasks, and demonstrate improved collision checking and distance query performance with only a minor loss in fidelity compared to the true collision geometry. We release our tool as an open source Python library and containerized command-line application to facilitate adoption across the robotics community.
@misc{coumar2025foam, title = {Foam: A Tool for Spherical Approximation of Robot Geometry}, author = {Coumar, Sai and Chang, Gilbert and Kodkani, Nihar and Kingston, Zachary}, eprint = {2503.13704}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, year = {2025}, }




2024
- Collision-Affording Point Trees: SIMD-Amenable Nearest Neighbors for Fast Collision CheckingIn Robotics: Science and Systems
Motion planning against sensor data is often a critical bottleneck in real-time robot control. For sampling-based motion planners, which are effective for high-dimensional systems such as manipulators, the most time-intensive component is collision checking. We present a novel spatial data structure, the collision-affording point tree (CAPT): an exact representation of point clouds that accelerates collision-checking queries between robots and point clouds by an order of magnitude, with an average query time of less than 10 nanoseconds on 3D scenes comprising thousands of points. With the CAPT, sampling-based planners can generate valid, high-quality paths in under a millisecond, with total end-to-end computation time faster than 60 FPS, on a single thread of a consumer-grade CPU. We also present a point cloud filtering algorithm, based on space-filling curves, which reduces the number of points in a point cloud while preserving structure. Our approach enables robots to plan at real-time speeds in sensed environments, opening up potential uses of planning for high-dimensional systems in dynamic, changing, and unmodeled environments.
@inproceedings{ramsey2024, title = {Collision-Affording Point Trees: SIMD-Amenable Nearest Neighbors for Fast Collision Checking}, author = {Ramsey, Clayton W. and Kingston, Zachary and Thomason, Wil and Kavraki, Lydia E.}, booktitle = {Robotics: Science and Systems}, year = {2024}, doi = {10.15607/RSS.2024.XX.038}, } - Motions in Microseconds via Vectorized Sampling-Based PlanningIn IEEE International Conference on Robotics and Automation
Modern sampling-based motion planning algorithms typically take between hundreds of milliseconds to dozens of seconds to find collision-free motions for high degree-of-freedom problems. This paper presents performance improvements of more than 500x over the state-of-the-art, bringing planning times into the range of microseconds and solution rates into the range of kilohertz, without specialized hardware. Our key insight is how to exploit fine-grained parallelism within sampling-based planners, providing generality-preserving algorithmic improvements to any such planner and significantly accelerating critical subroutines, such as forward kinematics and collision checking. We demonstrate our approach over a diverse set of challenging, realistic problems for complex robots ranging from 7 to 14 degrees-of-freedom. Moreover, we show that our approach does not require high-power hardware by also evaluating on a low-power single-board computer. The planning speeds demonstrated are fast enough to reside in the range of control frequencies and open up new avenues of motion planning research.
@inproceedings{thomason2024vamp, title = {Motions in Microseconds via Vectorized Sampling-Based Planning}, author = {Thomason, Wil and Kingston, Zachary and Kavraki, Lydia E.}, booktitle = {IEEE International Conference on Robotics and Automation}, pages = {8749--8756}, year = {2024}, doi = {10.1109/ICRA57147.2024.10611190}, } - Software Engineering for Robotics: Future Research Directions; Report from the 2023 Workshop on Software Engineering for RoboticsClaire Le Goues, Sebastian Elbaum, David Anthony, Z. Berkay Celik, Mauricio Castillo-Effen, Nikolaus Correll, Pooyan Jamshidi, Morgan Quigley, Trenton Tabor, and Qi ZhuInvited Contributor
@misc{Goues2024, title = {Software Engineering for Robotics: Future Research Directions; Report from the 2023 Workshop on Software Engineering for Robotics}, author = {Goues, Claire Le and Elbaum, Sebastian and Anthony, David and Celik, Z. Berkay and Castillo-Effen, Mauricio and Correll, Nikolaus and Jamshidi, Pooyan and Quigley, Morgan and Tabor, Trenton and Zhu, Qi}, journal = {arXiv preprint arXiv:2401.12317}, year = {2024}, note = {Invited Contributor} }


2022
- Robowflex: Robot Motion Planning with MoveIt Made EasyIn IEEE/RSJ International Conference on Intelligent Robots and Systems
Nominated for Best Paper for Industrial Robotics Research for Practicality.
Robowflex is a software library for robot motion planning in industrial and research applications, leveraging the popular MoveIt library and Robot Operating System (ROS) middleware. Robowflex takes advantage of the ease of motion planning with MoveIt while providing an augmented API to craft and manipulate motion planning queries within a single program. Robowflex’s high-level API simplifies many common use-cases while still providing access to the underlying MoveIt library. Robowflex is particularly useful for 1) developing new motion planners, 2) evaluation of motion planners, and 3) complex problems that use motion planning (e.g., task and motion planning). Robowflex also provides visualization capabilities, integrations to other robotics libraries (e.g., DART and Tesseract), and is complimentary to many other robotics packages. With our library, the user does not need to be an expert at ROS or MoveIt in order to set up motion planning queries, extract information from results, and directly interface with a variety of software components. We provide a few example use-cases that demonstrate its efficacy.
@inproceedings{kingston2022robowflex, title = {Robowflex: Robot Motion Planning with MoveIt Made Easy}, author = {Kingston, Zachary and Kavraki, Lydia E.}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems}, pages = {3108--3114}, year = {2022}, doi = {10.1109/IROS47612.2022.9981698}, }

2021
- MotionBenchMaker: A Tool to Generate and Benchmark Motion Planning DatasetsConstantinos Chamzas, Carlos Quintero-Peña, Zachary Kingston, Andreas Orthey, Daniel Rakita, Michael Gleicher, Marc Toussaint, and Lydia E. KavrakiIEEE Robotics and Automation Letters
Recently, there has been a wealth of development in motion planning for robotic manipulationnew motion planners are continuously proposed, each with its own unique set of strengths and weaknesses. However, evaluating these new planners is challenging, and researchers often create their own ad-hoc problems for benchmarking, which is time-consuming, prone to bias, and does not directly compare against other state-of-the-art planners. We present MotionBenchMaker, an open-source tool to generate benchmarking datasets for realistic robot manipulation problems. MotionBenchMaker is designed to be an extensible, easy-to-use tool that allows users to both generate datasets and benchmark them by comparing motion planning algorithms. Empirically, we show the benefit of using MotionBenchMaker as a tool to procedurally generate datasets which helps in the fair evaluation of planners. We also present a suite of over 40 prefabricated datasets, with 5 different commonly used robots in 8 environments, to serve as a common ground for future motion planning research.
@article{chamzas2021mbm, title = {MotionBenchMaker: A Tool to Generate and Benchmark Motion Planning Datasets}, author = {Chamzas, Constantinos and Quintero-Peña, Carlos and Kingston, Zachary and Orthey, Andreas and Rakita, Daniel and Gleicher, Michael and Toussaint, Marc and Kavraki, Lydia E.}, journal = {IEEE Robotics and Automation Letters}, volume = {7}, number = {2}, pages = {882--889}, year = {2021}, doi = {10.1109/LRA.2021.3133603}, } - HyperPlan: A Framework for Motion Planning Algorithm Selection and Parameter OptimizationIn IEEE/RSJ International Conference on Intelligent Robots and Systems
Over the years, many motion planning algorithms have been proposed. It is often unclear which algorithm might be best suited for a particular class of problems. The problem is compounded by the fact that algorithm performance can be highly dependent on parameter settings. This paper shows that hyperparameter optimization is an effective tool in both algorithm selection and parameter tuning over a given set of motion planning problems. We present different loss functions for optimization that capture different notions of optimality. The approach is evaluated on a broad range of scenes using two different manipulators, a Fetch and a Baxter. We show that optimized planning algorithm performance significantly improves upon baseline performance and generalizes broadly in the sense that performance improvements carry over to problems that are very different from the ones considered during optimization.
@inproceedings{moll2021hyper, title = {HyperPlan: A Framework for Motion Planning Algorithm Selection and Parameter Optimization}, author = {Moll, Mark and Chamzas, Constantinos and Kingston, Zachary and Kavraki, Lydia E.}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems}, pages = {2511--2518}, year = {2021}, doi = {10.1109/IROS51168.2021.9636651}, }


2017
-
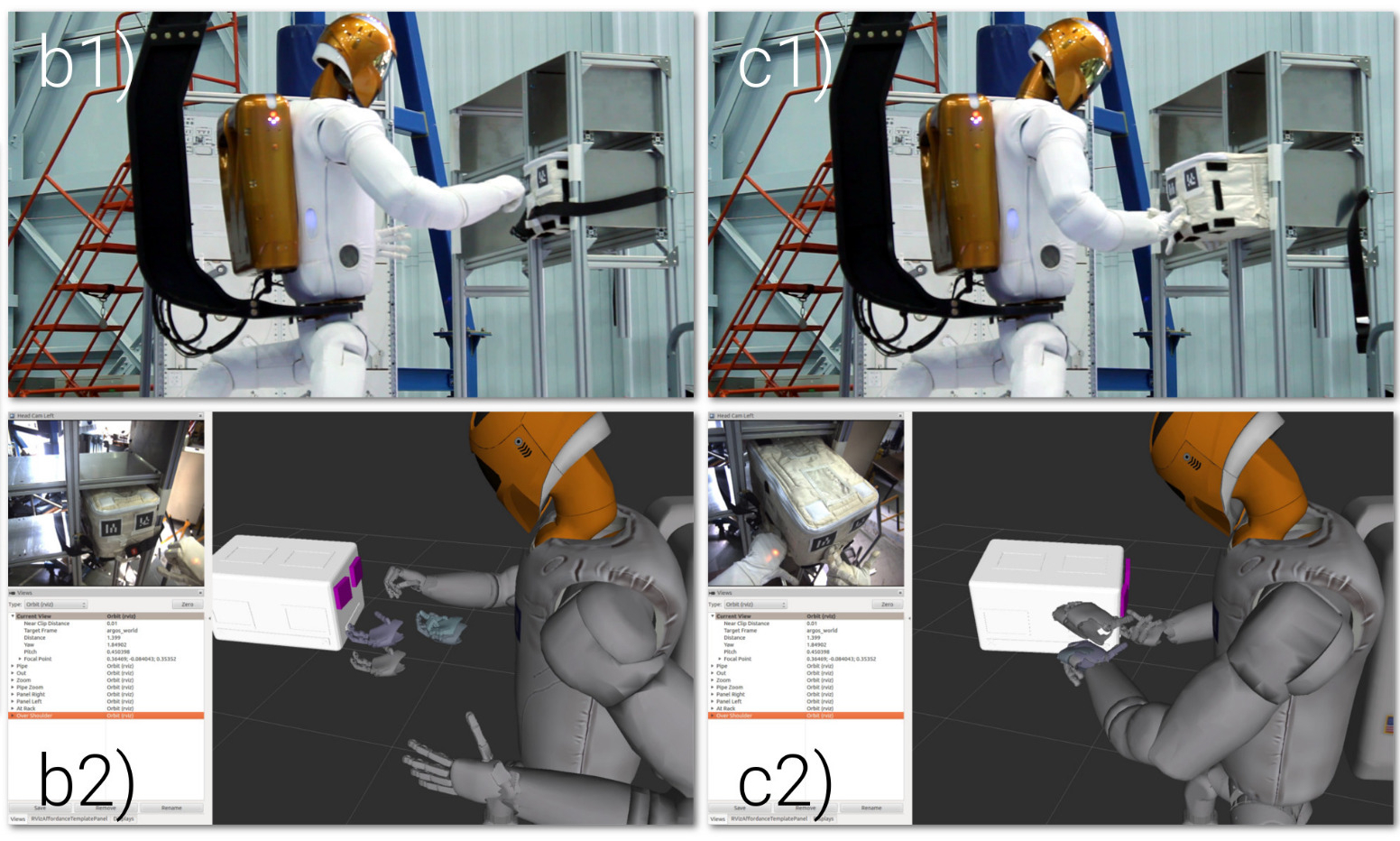 Robonaut 2 and You: Specifying and Executing Complex OperationsIn IEEE Workshop on Advanced Robotics and its Social Impacts
Robonaut 2 and You: Specifying and Executing Complex OperationsIn IEEE Workshop on Advanced Robotics and its Social ImpactsCrew time is a precious resource due to the expense of trained human operators in space. Efficient caretaker robots could lessen the manual labor load required by frequent vehicular and life support maintenance tasks, freeing astronaut time for scientific mission objectives. Humanoid robots can fluidly exist alongside human counterparts due to their form, but they are complex and high-dimensional platforms. This paper describes a system that human operators can use to maneuver Robonaut 2 (R2), a dexterous humanoid robot developed by NASA to research co-robotic applications. The system includes a specification of constraints used to describe operations, and the supporting planning framework that solves constrained problems on R2 at interactive speeds. The paper is developed in reference to an illustrative, typical example of an operation R2 performs to highlight the challenges inherent to the problems R2 must face. Finally, the interface and planner is validated through a case-study using the guiding example on the physical robot in a simulated microgravity environment. This work reveals the complexity of employing humanoid caretaker robots and suggest solutions that are broadly applicable.
@inproceedings{baker2017r2, title = {Robonaut 2 and You: Specifying and Executing Complex Operations}, author = {Baker, William and Kingston, Zachary and Moll, Mark and Badger, Julia and Kavraki, Lydia E.}, booktitle = {IEEE Workshop on Advanced Robotics and its Social Impacts}, pages = {1--8}, month = mar, year = {2017}, doi = {10.1109/ARSO.2017.8025204}, address = {Austin, TX}, }
