Publications
2026
- pRRTC: GPU-Parallel RRT-Connect for Fast, Consistent, and Low-Cost Motion PlanningIn IEEE International Conference on Robotics and AutomationTo Appear
Sampling-based motion planning algorithms, like the Rapidly-Exploring Random Tree (RRT) and its widely used variant, RRT-Connect, provide efficient solutions for high-dimensional planning problems faced by real-world robots. However, these methods remain computationally intensive, particularly in complex environments that require many collision checks. As such, to improve performance, recent efforts have explored parallelizing specific components of RRT, such as collision checking or running multiple planners independently, but no prior work has integrated parallelism at multiple levels of the algorithm for robotic manipulation. In this work, we present pRRTC, a GPU-accelerated implementation of RRT-Connect that achieves parallelism across the entire algorithm through multithreaded expansion and connection, SIMT-optimized collision checking, and hierarchical parallelism optimization, improving efficiency, consistency, and initial solution cost. We evaluate the effectiveness of pRRTC on the MotionBenchMaker dataset using robots with 7, 8, and 14 degrees-of-freedom, demonstrating up to 6x average speedup on constrained reaching tasks at high collision checking resolution compared to state-of-the-art. pRRTC also demonstrates a 5x reduction in solution time variance and 1.5x improvement in initial path costs compared to state-of-the-art motion planners in complex environments across all robots.
@inproceedings{huangjadhav2025prrtc, title = {{pRRTC}: {GPU}-Parallel {RRT}-Connect for Fast, Consistent, and Low-Cost Motion Planning}, author = {Huang, Chih H. and Jadhav, Pranav and Plancher, Brian and Kingston, Zachary}, booktitle = {IEEE International Conference on Robotics and Automation}, year = {2026}, note = {To Appear}, } - Parallel Heuristic Search as Inference for Actor-Critic Reinforcement Learning ModelsIn IEEE International Conference on Robotics and AutomationTo Appear
Actor-Critic models are a class of model-free deep reinforcement learning (RL) algorithms that have demonstrated effectiveness across various robot learning tasks. While considerable research has focused on improving training stability and data sampling efficiency, most deployment strategies have remained relatively simplistic, typically relying on direct actor policy rollouts. In contrast, we propose PACHS (Parallel Actor-Critic Heuristic Search), an efficient parallel best-first search algorithm for inference that leverages both components of the actor-critic architecture: the actor network generates actions, while the critic network provides cost-to-go estimates to guide the search. Two levels of parallelism are employed within the search – actions and cost-to-go estimates are generated in batches by the actor and critic networks respectively, and graph expansion is distributed across multiple threads. We demonstrate the effectiveness of our approach in robotic manipulation tasks, including collision-free motion planning and contact-rich interactions such as non-prehensile pushing.
@inproceedings{yang2025pachs, title = {Parallel Heuristic Search as Inference for Actor-Critic Reinforcement Learning Models}, author = {Yang, Hanlan and Mishani, Itamar and Pivetti, Luca and Kingston, Zachary and Likhachev, Maxim}, booktitle = {IEEE International Conference on Robotics and Automation}, year = {2026}, note = {To Appear}, } - Differentiable Particle Optimization for Fast Sequential ManipulationIn IEEE International Conference on Robotics and AutomationTo Appear
Sequential robot manipulation tasks require finding collision-free trajectories that satisfy geometric constraints across multiple object interactions in potentially high-dimensional configuration spaces. Solving these problems in real-time and at large scales has remained out of reach due to computational requirements. Recently, GPU-based acceleration has shown promising results, but prior methods achieve limited performance due to CPU-GPU data transfer overhead and complex logic that prevents full hardware utilization. To this end, we present SPaSM (Sampling Particle optimization for Sequential Manipulation), a fully GPU-parallelized framework that compiles constraint evaluation, sampling, and gradient-based optimization into optimized CUDA kernels for end-to-end trajectory optimization without CPU coordination. The method consists of a two-stage particle optimization strategy: first solving placement constraints through massively parallel sampling, then lifting solutions to full trajectory optimization in joint space. Unlike hierarchical approaches, SPaSM jointly optimizes object placements and robot trajectories to handle scenarios where motion feasibility constrains placement options. Experimental evaluation on challenging benchmarks demonstrates solution times in the realm of milliseconds with a 100% success rate; a 4000x speedup compared to existing approaches.
@inproceedings{chen2025spasm, title = {Differentiable Particle Optimization for Fast Sequential Manipulation}, author = {Chen, Lucas and Iyer, Shrutheesh R. and Kingston, Zachary}, booktitle = {IEEE International Conference on Robotics and Automation}, year = {2026}, note = {To Appear}, } - Revisiting Replanning from Scratch: Real-Time Incremental Planning with Fast Almost-Surely Asymptotically Optimal PlannersMitchell E. C. Sabbadini, Andrew H. Liu, Joseph Ruan, Tyler S. Wilson, Zachary Kingston, and Jonathan D. GammellIn IEEE International Conference on Robotics and AutomationTo Appear
Robots operating in changing environments either predict obstacle changes and/or plan quickly enough to react to them. Predictive approaches require a strong prior about the position and motion of obstacles. Reactive approaches require no assumptions about their environment but must replan quickly and find high-quality paths to navigate effectively. Reactive approaches often reuse information between queries to reduce planning cost. These techniques are conceptually sound but updating dense planning graphs when information changes can be computationally prohibitive. It can also require significant effort to detect the changes in some applications. This paper revisits the long-held assumption that reactive replanning requires updating existing plans. It shows that the incremental planning problem can alternatively be solved more efficiently as a series of independent problems using fast almost-surely asymptotically optimal (ASAO) planning algorithms. These ASAO algorithms quickly find an initial solution and converge towards an optimal solution which allows them to find consistent global plans in the presence of changing obstacles without requiring explicit plan reuse. This is demonstrated with simulated experiments where Effort Informed Trees (EIT*) finds shorter median solution paths than the tested reactive planning algorithms and is further validated using Asymptotically Optimal RRT-Connect (AORRTC) on a real-world planning problem on a robot arm.
@inproceedings{sabbadini2025replan, title = {Revisiting Replanning from Scratch: Real-Time Incremental Planning with Fast Almost-Surely Asymptotically Optimal Planners}, author = {Sabbadini, Mitchell E. C. and Liu, Andrew H. and Ruan, Joseph and Wilson, Tyler S. and Kingston, Zachary and Gammell, Jonathan D.}, booktitle = {IEEE International Conference on Robotics and Automation}, year = {2026}, note = {To Appear}, } - SoRo
 Parallel Simulation of Contact and Actuation for Soft Growing RobotsYitian Gao*, Lucas Chen*, Priyanka Bhovad, Sicheng Wang, Zachary Kingston, and Laura H. BlumenscheinSoft Robotics
Parallel Simulation of Contact and Actuation for Soft Growing RobotsYitian Gao*, Lucas Chen*, Priyanka Bhovad, Sicheng Wang, Zachary Kingston, and Laura H. BlumenscheinSoft RoboticsSoft growing robots, commonly referred to as vine robots, have demonstrated remarkable ability to interact safely and robustly with unstructured and dynamic environments. It is therefore natural to exploit contact with the environment for planning and design optimization tasks. Previous research has focused on planning under contact for passively deforming robots with pre-formed bends. However, adding active steering to these soft growing robots is necessary for successful navigation in more complex environments. To this end, we develop a unified modeling framework that integrates vine robot growth, bending, actuation, and obstacle contact. We extend the beam moment model to include the effects of actuation on kinematics under growth and then use these models to develop a fast parallel simulation framework. We validate our model and simulator with real robot experiments. To showcase the capabilities of our framework, we apply our model in a design optimization task to find designs for vine robots navigating through cluttered environments, identifying designs that minimize the number of required actuators by exploiting environmental contacts. We show the robustness of the designs to environmental and manufacturing uncertainties. Finally, we fabricate an optimized design and successfully deploy it in an obstacle-rich environment.
@article{gaochen2025actsim, title = {Parallel Simulation of Contact and Actuation for Soft Growing Robots}, author = {Gao, Yitian and Chen, Lucas and Bhovad, Priyanka and Wang, Sicheng and Kingston, Zachary and Blumenschein, Laura H.}, journal = {Soft Robotics}, year = {2026}, doi = {10.1177/21695172261425906}, } - Efficient Multi-Robot Motion Planning for Manifold-Constrained Manipulators by Randomized Scheduling and Informed Path GenerationIEEE Robotics and Automation Letters
Multi-robot motion planning for high degree-of-freedom manipulators in shared, constrained, and narrow spaces is a complex problem and essential for many scenarios such as construction, surgery, and more. Traditional coupled and decoupled methods either scale poorly or lack completeness, and hybrid methods that compose paths from individual robots together require the enumeration of many paths before they can find valid composite solutions. This paper introduces Scheduling to Avoid Collisions (StAC), a hybrid approach that more effectively composes paths from individual robots by scheduling (adding random stops and coordination motion along each path) and generates paths that are more likely to be feasible by using bidirectional feedback between the scheduler and motion planner for informed sampling. StAC uses 10 to 100 times fewer paths from the low-level planner than state-of-the-art baselines on challenging problems in manipulator cases.
@article{guo2026stac, title = {Efficient Multi-Robot Motion Planning for Manifold-Constrained Manipulators by Randomized Scheduling and Informed Path Generation}, author = {Guo, Weihang and Kingston, Zachary and Hang, Kaiyu and Kavraki, Lydia E.}, journal = {IEEE Robotics and Automation Letters}, year = {2026}, doi = {10.1109/LRA.2026.3662639}, } - arXivUltrafast Sampling-based Kinodynamic Planning via Differential FlatnessUnder Review
Motion planning under dynamics constraints, i.e., kinodynamic planning, enables safe robot operation by generating dynamically feasible trajectories that the robot can accurately track. For high-DoF robots such as manipulators, sampling-based motion planners are commonly used, especially for complex tasks in cluttered environments. However, enforcing constraints on robot dynamics in such planners requires solving either challenging two-point boundary value problems (BVPs) or propagating robot dynamics over time, both of which are computational bottlenecks that drastically increase planning times. Meanwhile, recent efforts have shown that sampling-based motion planners can generate plans in microseconds using parallelization, but are limited to geometric paths. This paper develops AkinoPDF, a fast parallelized sampling-based kinodynamic motion planning technique for a broad class of differentially flat robot systems, including manipulators, ground and aerial vehicles, and more. Differential flatness allows us to transform the motion planning problem from the original state space to a flat output space, where an analytical time-parameterized solution of the BVP and dynamics integration can be obtained. A trajectory in the flat output space is then converted back to a closed-form dynamically feasible trajectory in the original state space, enabling fast validation via “single instruction, multiple data" parallelism. Our method is fast, exact, and compatible with any sampling-based motion planner. We extensively verify the effectiveness of our approach in both simulated benchmarks and real experiments with cluttered and dynamic environments, requiring mere microseconds to milliseconds of planning time.
@misc{duong2026akinopdf, title = {Ultrafast Sampling-based Kinodynamic Planning via Differential Flatness}, author = {Duong, Thai and Ramsey, Clayton W. and Kingston, Zachary and Thomason, Wil and Kavraki, Lydia E.}, year = {2026}, eprint. = {2603.16059}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, note = {Under Review}, } - arXiv
 AgenticLab: A Real-World Robot Agent Platform that Can See, Think, and ActPengyuan Guo, Zhonghao Mai, Zhengtong Xu, Kaidi Zhang, Heng Zhang, Zichen Miao, Arash Ajoudani, Zachary Kingston, Qiang Qiu, and Yu SheUnder Review
AgenticLab: A Real-World Robot Agent Platform that Can See, Think, and ActPengyuan Guo, Zhonghao Mai, Zhengtong Xu, Kaidi Zhang, Heng Zhang, Zichen Miao, Arash Ajoudani, Zachary Kingston, Qiang Qiu, and Yu SheUnder ReviewRecent advances in large vision-language models (VLMs) have demonstrated generalizable open-vocabulary perception and reasoning, yet their real-robot manipulation capability remains unclear for long-horizon, closed-loop execution in unstructured, in-the-wild environments. Prior VLM-based manipulation pipelines are difficult to compare across different research groups’ setups, and many evaluations rely on simulation, privileged state, or specially designed setups. We present AgenticLab, a model-agnostic robot agent platform and benchmark for open-world manipulation. AgenticLab provides a closed-loop agent pipeline for perception, task decomposition, online verification, and replanning. Using AgenticLab, we benchmark state-of-the-art VLM-based agents on real-robot tasks in unstructured environments. Our benchmark reveals several failure modes that offline vision-language tests (e.g., VQA and static image understanding) fail to capture, including breakdowns in multi-step grounding consistency, object grounding under occlusion and scene changes, and insufficient spatial reasoning for reliable manipulation. We will release the full hardware and software stack to support reproducible evaluation and accelerate research on general-purpose robot agents.
@misc{guo2026agenticlab, title = {{AgenticLab}: A Real-World Robot Agent Platform that Can See, Think, and Act}, author = {Guo, Pengyuan and Mai, Zhonghao and Xu, Zhengtong and Zhang, Kaidi and Zhang, Heng and Miao, Zichen and Ajoudani, Arash and Kingston, Zachary and Qiu, Qiang and She, Yu}, year = {2026}, eprint = {2602.01662}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, note = {Under Review}, }







2025
- Variational Shape Inference for Grasp Diffusion on SE(3)IEEE Robotics and Automation Letters
Grasp synthesis is a fundamental task in robotic manipulation which usually has multiple feasible solutions. Multimodal grasp synthesis seeks to generate diverse sets of stable grasps conditioned on object geometry, making the robust learning of geometric features crucial for success. To address this challenge, we propose a framework for learning multimodal grasp distributions that leverages variational shape inference to enhance robustness against shape noise and measurement sparsity. Our approach first trains a variational autoencoder for shape inference using implicit neural representations, and then uses these learned geometric features to guide a diffusion model for grasp synthesis on the SE(3) manifold. Additionally, we introduce a test-time grasp optimization technique that can be integrated as a plugin to further enhance grasping performance. Experimental results demonstrate that our shape inference for grasp synthesis formulation outperforms state-of-the-art multimodal grasp synthesis methods on the ACRONYM dataset by 6.3%, while demonstrating robustness to deterioration in point cloud density compared to other approaches. Furthermore, our trained model achieves zero-shot transfer to real-world manipulation of household objects, generating 34% more successful grasps than baselines despite measurement noise and point cloud calibration errors.
@article{bukhari2025graspdiff, title = {Variational Shape Inference for Grasp Diffusion on SE(3)}, author = {Bukhari, S. Talha and Agrawal, Kaivalya and Kingston, Zachary and Bera, Aniket}, journal = {IEEE Robotics and Automation Letters}, year = {2025}, doi = {10.1109/LRA.2025.3645521}, } - AORRTC: Almost-Surely Asymptotically Optimal Planning with RRT-ConnectIEEE Robotics and Automation Letters
Finding high-quality solutions quickly is an important objective in motion planning. This is especially true for high-degree-of-freedom robots. Satisficing planners have traditionally found feasible solutions quickly but provide no guarantees on their optimality, while almost-surely asymptotically optimal (a.s.a.o.) planners have probabilistic guarantees on their convergence towards an optimal solution but are more computationally expensive. This paper uses the AO-x meta-algorithm to extend the satisficing RRT-Connect planner to optimal planning. The resulting Asymptotically Optimal RRT-Connect (AORRTC) finds initial solutions in similar times as RRT-Connect and uses any additional planning time to converge towards the optimal solution in an anytime manner. It is proven to be probabilistically complete and a.s.a.o. AORRTC was tested with the Panda (7 DoF) and Fetch (8 DoF) robotic arms on the MotionBenchMaker dataset. These experiments show that AORRTC finds initial solutions as fast as RRT-Connect and faster than the tested state-of-the-art a.s.a.o. algorithms while converging to better solutions faster. AORRTC finds solutions to difficult high-DoF planning problems in milliseconds where the other a.s.a.o. planners could not consistently find solutions in seconds. This performance was demonstrated both with and without single instruction/multiple data (SIMD) acceleration.
@article{wilson2025aorrtc, title = {{AORRTC}: Almost-Surely Asymptotically Optimal Planning with {RRT}-Connect}, author = {Wilson, Tyler S. and Thomason, Wil and Kingston, Zachary and Gammell, Jonathan D.}, journal = {IEEE Robotics and Automation Letters}, year = {2025}, doi = {10.1109/LRA.2025.3615522}, } - OCEANS
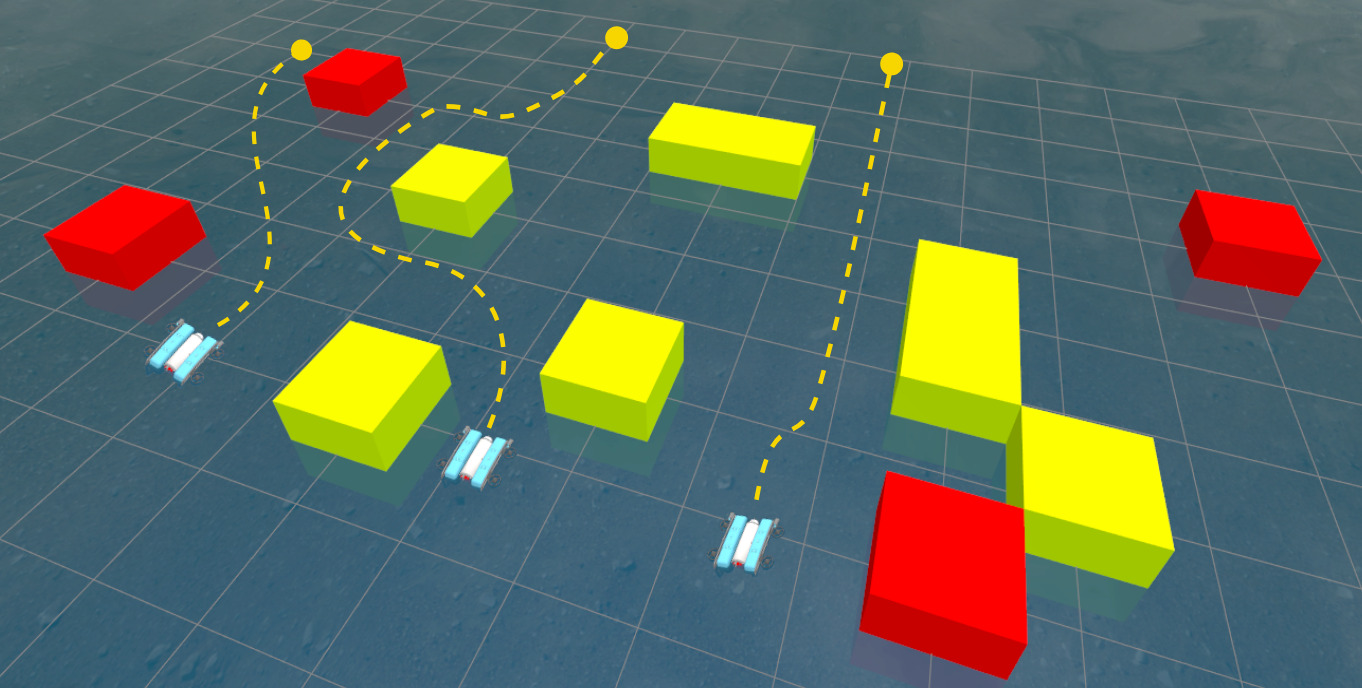 Underwater Multi-Robot Simulation and Motion Planning in AnglerIn IEEE/MTS OCEANS Conference
Underwater Multi-Robot Simulation and Motion Planning in AnglerIn IEEE/MTS OCEANS ConferenceDeploying multi-robot systems in underwater environments is expensive and lengthy; testing algorithms and software in simulation improves development by decoupling software and hardware. However, this requires a simulation framework that closely resembles the real-world. Angler is an open-source framework that simulates low-level communication protocols for an onboard autopilot, such as ArduSub, providing a framework that is close to reality, but unfortunately lacking support for simulating multiple robots. We present an extension to Angler that supports multi-robot simulation and motion planning. Our extension has a modular architecture that creates non-conflicting communication channels between Gazebo, ArduSub Software-in-the-Loop (SITL), and MAVROS to operate multiple robots simultaneously in the same environment. Our multi-robot motion planning module interfaces with cascaded controllers via a JointTrajectory controller in ROS 2. We also provide an integration with the Open Motion Planning Library (OMPL), a collision avoidance module, and tools for procedural environment generation. Our work enables the development and benchmarking of underwater multi-robot motion planning in dynamic environments.
@inproceedings{agrawal2025mrangler, title = {Underwater Multi-Robot Simulation and Motion Planning in Angler}, author = {Agrawal, Akshaya and Palmer, Evan and Kingston, Zachary and Hollinger, Geoffrey A.}, booktitle = {IEEE/MTS OCEANS Conference}, pages = {1--6}, year = {2025}, doi = {10.1109/OCEANS58557.2025.11104649}, address = {Brest, France}, } - RoboSoft
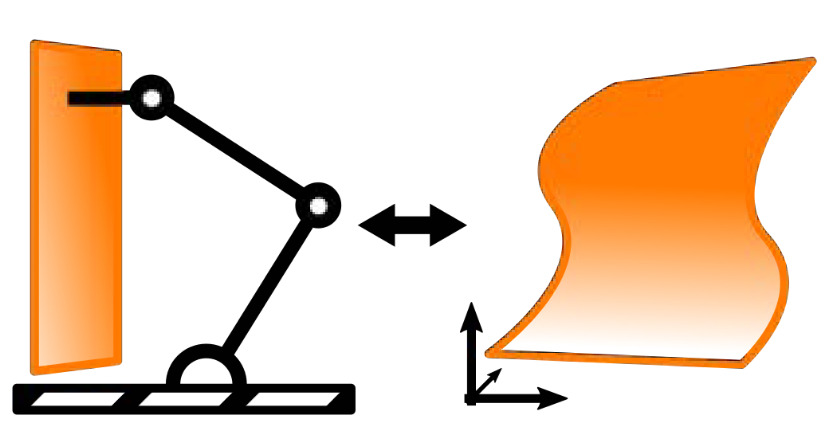
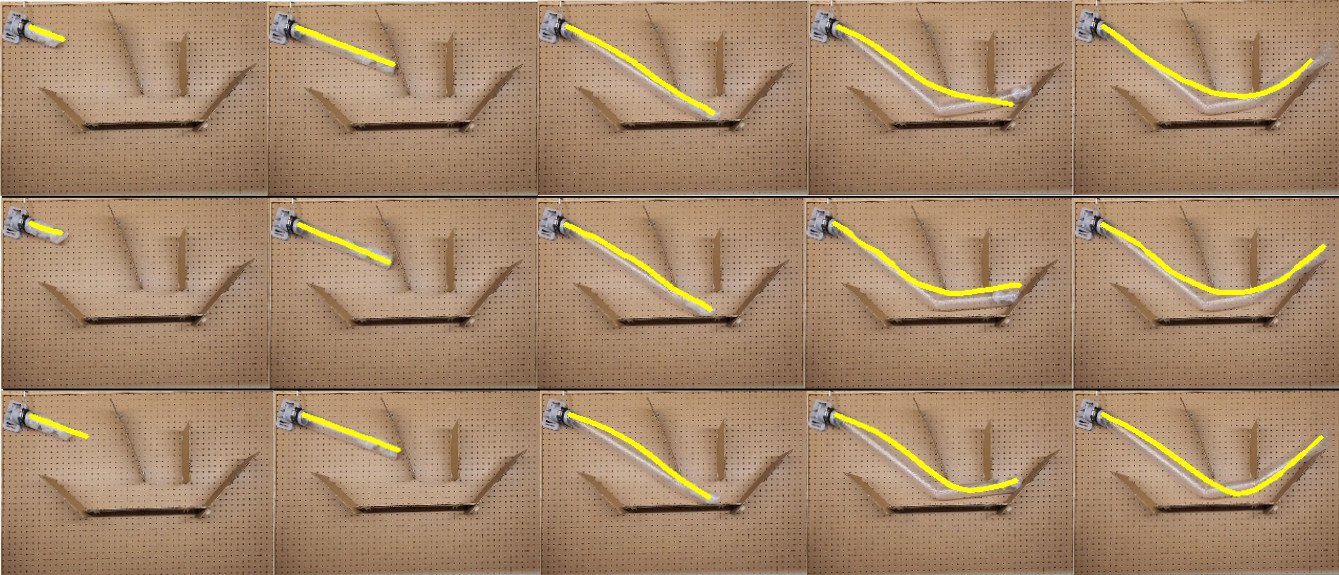 Physics-Grounded Differentiable Simulation for Soft Growing RobotsLucas Chen*, Yitian Gao*, Sicheng Wang, Francesco Fuentes, Laura H. Blumenschein, and Zachary KingstonIn IEEE-RAS International Conference on Soft Robotics
Physics-Grounded Differentiable Simulation for Soft Growing RobotsLucas Chen*, Yitian Gao*, Sicheng Wang, Francesco Fuentes, Laura H. Blumenschein, and Zachary KingstonIn IEEE-RAS International Conference on Soft RoboticsSoft-growing robots (i.e., vine robots) are a promising class of soft robots that allow for navigation and growth in tightly confined environments. However, these robots remain challenging to model and control due to the complex interplay of the inflated structure and inextensible materials, which leads to obstacles for autonomous operation and design optimization. Although there exist simulators for these systems that have achieved qualitative and quantitative success in matching high-level behavior, they still often fail to capture realistic vine robot shapes using simplified parameter models and have difficulties in high-throughput simulation necessary for planning and parameter optimization. We propose a differentiable simulator for these systems, enabling the use of the simulator "in-the-loop" of gradient-based optimization approaches to address the issues listed above. With the more complex parameter fitting made possible by this approach, we experimentally validate and integrate a closed-form nonlinear stiffness model for thin-walled inflated tubes based on a first-principles approach to local material wrinkling. Our simulator also takes advantage of data-parallel operations by leveraging existing differentiable computation frameworks, allowing multiple simultaneous rollouts. We demonstrate the feasibility of using a physics-grounded nonlinear stiffness model within our simulator, and how it can be an effective tool in sim-to-real transfer. We provide our implementation open source.
@inproceedings{chengao2025diffsim, title = {Physics-Grounded Differentiable Simulation for Soft Growing Robots}, author = {Chen, Lucas and Gao, Yitian and Wang, Sicheng and Fuentes, Francesco and Blumenschein, Laura H. and Kingston, Zachary}, booktitle = {IEEE-RAS International Conference on Soft Robotics}, pages = {1--8}, year = {2025}, doi = {10.1109/RoboSoft63089.2025.11020809}, } - Nearest-Neighbourless Asymptotically Optimal Motion Planning with Fully Connected Informed Trees (FCIT*)In IEEE International Conference on Robotics and Automation
Improving the performance of motion planning algorithms for high-degree-of-freedom robots usually requires reducing the cost or frequency of computationally expensive operations. Traditionally, and especially for asymptotically optimal sampling-based motion planners, the most expensive operations are local motion validation and querying the nearest neighbours of a configuration. Recent advances have significantly reduced the cost of motion validation by using single instruction/multiple data (SIMD) parallelism to improve solution times for satisficing motion planning problems. These advances have not yet been applied to asymptotically optimal motion planning. This paper presents Fully Connected Informed Trees (FCIT*), the first fully connected, informed, anytime almost-surely asymptotically optimal (ASAO) algorithm. FCIT* exploits the radically reduced cost of edge evaluation via SIMD parallelism to build and search fully connected graphs. This removes the need for nearest-neighbours structures, which are a dominant cost for many sampling-based motion planners, and allows it to find initial solutions faster than state-of-the-art ASAO (VAMP, OMPL) and satisficing (OMPL) algorithms on the MotionBenchMaker dataset while converging towards optimal plans in an anytime manner.
@inproceedings{wilson2025fcit, title = {Nearest-Neighbourless Asymptotically Optimal Motion Planning with Fully Connected Informed Trees ({FCIT}*)}, author = {Wilson, Tyler S. and Thomason, Wil and Kingston, Zachary and Kavraki, Lydia E. and Gammell, Jonathan D.}, booktitle = {IEEE International Conference on Robotics and Automation}, pages = {14140--14146}, year = {2025}, doi = {10.1109/ICRA55743.2025.11127785}, } - Constrained Nonlinear Kaczmarz Projection on Intersections of Manifolds for Coordinated Multi-Robot Mobile ManipulationIn IEEE International Conference on Robotics and Automation
Cooperative manipulation tasks impose various structure-, task-, and robot-specific constraints on mobile manipulators. However, current methods struggle to model and solve these myriad constraints simultaneously. We propose a twofold solution: first, we model constraints as a family of manifolds amenable to simultaneous solving. Second, we introduce the constrained nonlinear Kaczmarz (cNKZ) projection technique to produce constraint-satisfying solutions. Experiments show that cNKZ dramatically outperforms baseline approaches, which cannot find solutions at all. We integrate cNKZ with a sampling-based motion planning algorithm to generate complex, coordinated motions for 3 to 6 mobile manipulators (18–36 DoF), with cNKZ solving up to 80 nonlinear constraints simultaneously and achieving up to a 92% success rate in cluttered environments. We also demonstrate our approach on hardware using three Turtlebot3 Waffle Pi robots with OpenMANIPULATOR-X arms.
@inproceedings{agrawal2025cnkz, title = {Constrained Nonlinear {Kaczmarz} Projection on Intersections of Manifolds for Coordinated Multi-Robot Mobile Manipulation}, author = {Agrawal, Akshaya and Mayer, Parker and Kingston, Zachary and Hollinger, Geoffrey A.}, booktitle = {IEEE International Conference on Robotics and Automation}, pages = {7726--7732}, year = {2025}, doi = {10.1109/ICRA55743.2025.11127991}, } - CaStL: Constraints as Specifications through LLM Translation for Long-Horizon Task and Motion PlanningIn IEEE International Conference on Robotics and Automation
Large Language Models (LLMs) have demonstrated remarkable ability in long-horizon Task and Motion Planning (TAMP) by translating clear and straightforward natural language problems into formal specifications such as the Planning Domain Definition Language (PDDL). However, real-world problems are often ambiguous and involve many complex constraints. In this paper, we introduce Constraints as Specifications through LLMs (CaStL), a framework that identifies constraints such as goal conditions, action ordering, and action blocking from natural language in multiple stages. CaStL translates these constraints into PDDL and Python scripts, which are solved using an custom PDDL solver. Tested across three PDDL domains, CaStL significantly improves constraint handling and planning success rates from natural language specification in complex scenarios.
@inproceedings{guo2025castl, title = {{CaStL}: Constraints as Specifications through {LLM} Translation for Long-Horizon Task and Motion Planning}, author = {Guo, Weihang and Kingston, Zachary and Kavraki, Lydia E.}, booktitle = {IEEE International Conference on Robotics and Automation}, pages = {11957--11964}, year = {2025}, doi = {10.1109/ICRA55743.2025.11127555}, } - arXiv
 Exteroception through Proprioception Sensing through Improved Contact Modeling for Soft Growing RobotsFrancesco Fuentes, Serigne Diagne, Zachary Kingston, and Laura H. BlumenscheinUnder Review
Exteroception through Proprioception Sensing through Improved Contact Modeling for Soft Growing RobotsFrancesco Fuentes, Serigne Diagne, Zachary Kingston, and Laura H. BlumenscheinUnder ReviewPassive deformation due to compliance is a commonly used benefit of soft robots, providing opportunities to achieve robust actuation with few active degrees of freedom. Soft growing robots in particular have shown promise in navigation of unstructured environments due to their passive deformation. If their collisions and subsequent deformations can be better understood, soft robots could be used to understand the structure of the environment from direct tactile measurements. In this work, we propose the use of soft growing robots as mapping and exploration tools. We do this by first characterizing collision behavior during discrete turns, then leveraging this model to develop a geometry-based simulator that models robot trajectories in 2D environments. Finally, we demonstrate the model and simulator validity by mapping unknown environments using Monte Carlo sampling to estimate the optimal next deployment given current knowledge. Over both uniform and non-uniform environments, this selection method rapidly approaches ideal actions, showing the potential for soft growing robots in unstructured environment exploration and mapping.
@misc{fuentes2025sensing, title = {Exteroception through Proprioception Sensing through Improved Contact Modeling for Soft Growing Robots}, author = {Fuentes, Francesco and Diagne, Serigne and Kingston, Zachary and Blumenschein, Laura H.}, eprint = {2507.10694}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, year = {2025}, note = {Under Review}, } - arXiv
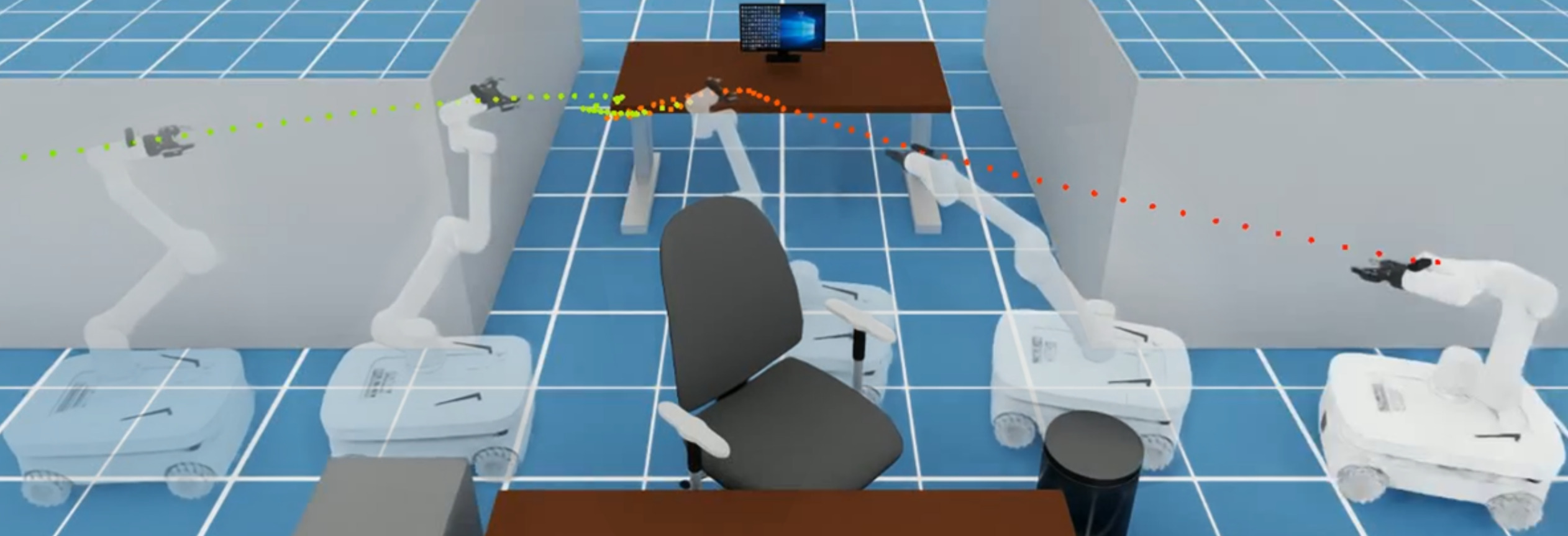 Look as You Leap: Planning Simultaneous Motion and Perception for High-DoF RobotsQingxi Meng, Emiliano Flores, Carlos Quintero-Peña, Peizhu Qian, Zachary Kingston, Shannan K. Hamlin, Vaibhav Unhelkar, and Lydia E. KavrakiUnder Review
Look as You Leap: Planning Simultaneous Motion and Perception for High-DoF RobotsQingxi Meng, Emiliano Flores, Carlos Quintero-Peña, Peizhu Qian, Zachary Kingston, Shannan K. Hamlin, Vaibhav Unhelkar, and Lydia E. KavrakiUnder ReviewIn this work, we address the problem of planning robot motions for a high-degree-of-freedom (DoF) robot that effectively achieves a given perception task while the robot and the perception target move in a dynamic environment. Achieving navigation and perception tasks simultaneously is challenging, as these objectives often impose conflicting requirements. Existing methods that compute motion under perception constraints fail to account for obstacles, are designed for low-DoF robots, or rely on simplified models of perception. Furthermore, in dynamic real-world environments, robots must replan and react quickly to changes and directly evaluating the quality of perception (e.g., object detection confidence) is often expensive or infeasible at runtime. This problem is especially important in human-centered environments such as homes and hospitals, where effective perception is essential for safe and reliable operation. To address these challenges, we propose a GPU-parallelized perception-score-guided probabilistic roadmap planner with a neural surrogate model (PS-PRM). The planner explicitly incorporates the estimated quality of a perception task into motion planning for high-DoF robots. Our method uses a learned model to approximate perception scores and leverages GPU parallelism to enable efficient online replanning in dynamic settings. We demonstrate that our planner, evaluated on high-DoF robots, outperforms baseline methods in both static and dynamic environments in both simulation and real-robot experiments.
@misc{meng2025look, title = {Look as You Leap: Planning Simultaneous Motion and Perception for High-{DoF} Robots}, author = {Meng, Qingxi and Flores, Emiliano and Quintero-Peña, Carlos and Qian, Peizhu and Kingston, Zachary and Hamlin, Shannan K. and Unhelkar, Vaibhav and Kavraki, Lydia E.}, eprint = {2509.19610}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, year = {2025}, note = {Under Review}, } - arXiv
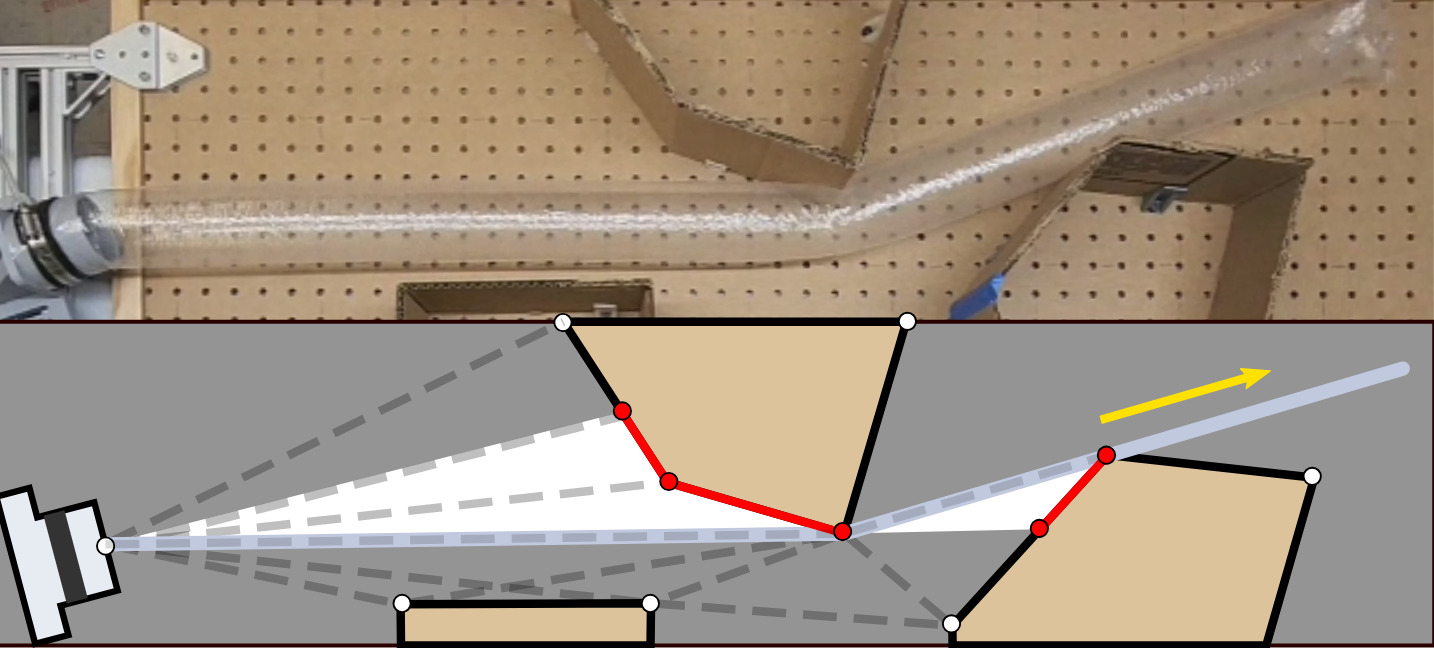
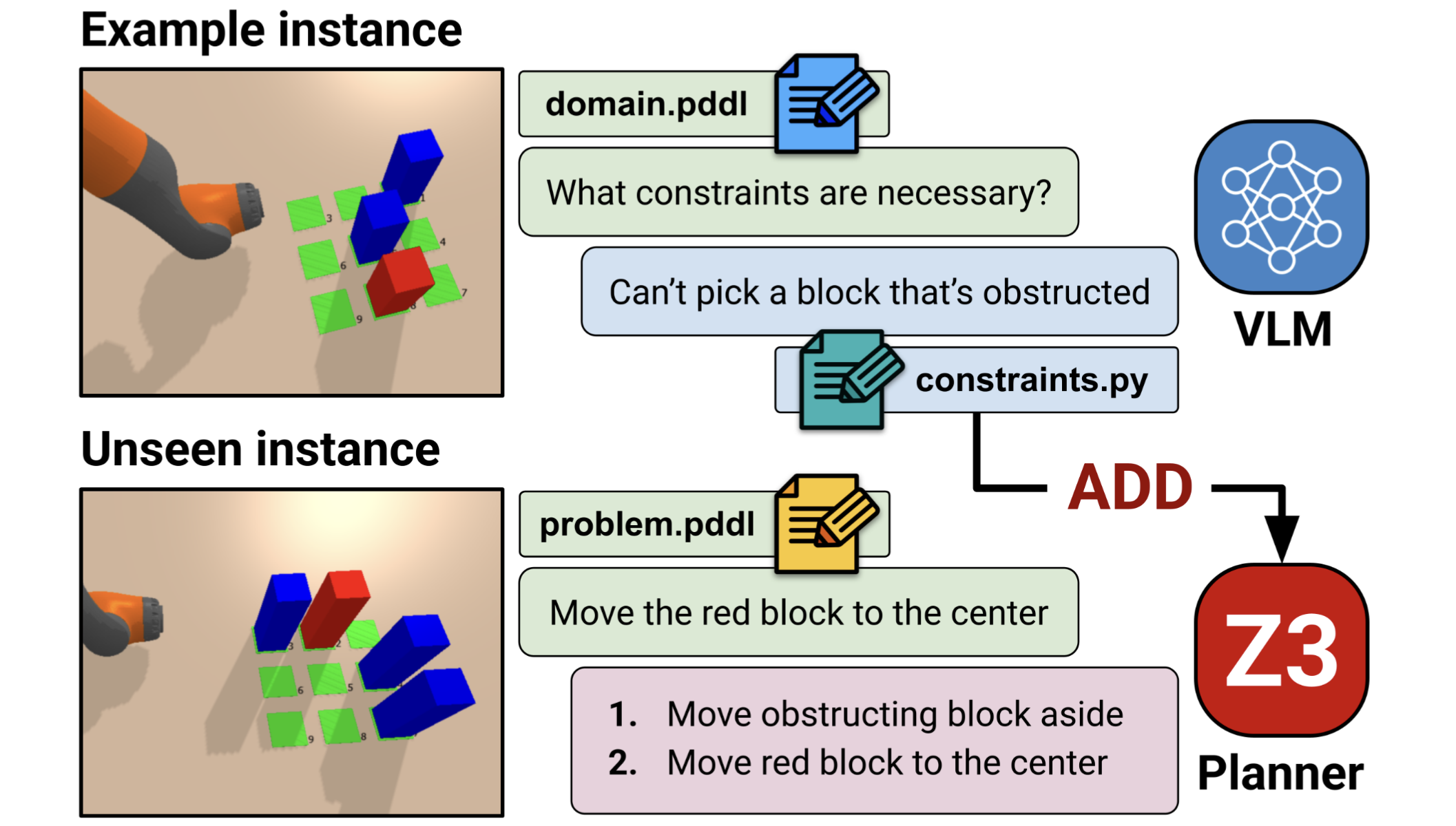 Using VLM Reasoning to Constrain Task and Motion Planning
Using VLM Reasoning to Constrain Task and Motion PlanningIn task and motion planning, high-level task planning is done over an abstraction of the world to enable efficient search in long-horizon robotics problems. However, the feasibility of these task-level plans relies on the downward refinability of the abstraction into continuous motion. When a domain’s refinability is poor, task-level plans that appear valid may ultimately fail during motion planning, requiring replanning and resulting in slower overall performance. Prior works mitigate this by encoding refinement issues as constraints to prune infeasible task plans. However, these approaches only add constraints upon refinement failure, expending significant search effort on infeasible branches. We propose VIZ-COAST, a method of leveraging the common-sense spatial reasoning of large pretrained Vision-Language Models to identify issues with downward refinement a priori, bypassing the need to fix these failures during planning. Experiments on two challenging TAMP domains show that our approach is able to extract plausible constraints from images and domain descriptions, drastically reducing planning times and, in some cases, eliminating downward refinement failures altogether, generalizing to a diverse range of instances from the broader domain.
@misc{yan2025vizcoast, title = {Using {VLM} Reasoning to Constrain Task and Motion Planning}, author = {Yan, Muyang and Mengdibayev, Miras and Floros, Ardon and Guo, Weihang and Kavraki, Lydia E. and Kingston, Zachary}, year = {2025}, eprint = {2510.25548}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, } - arXiv
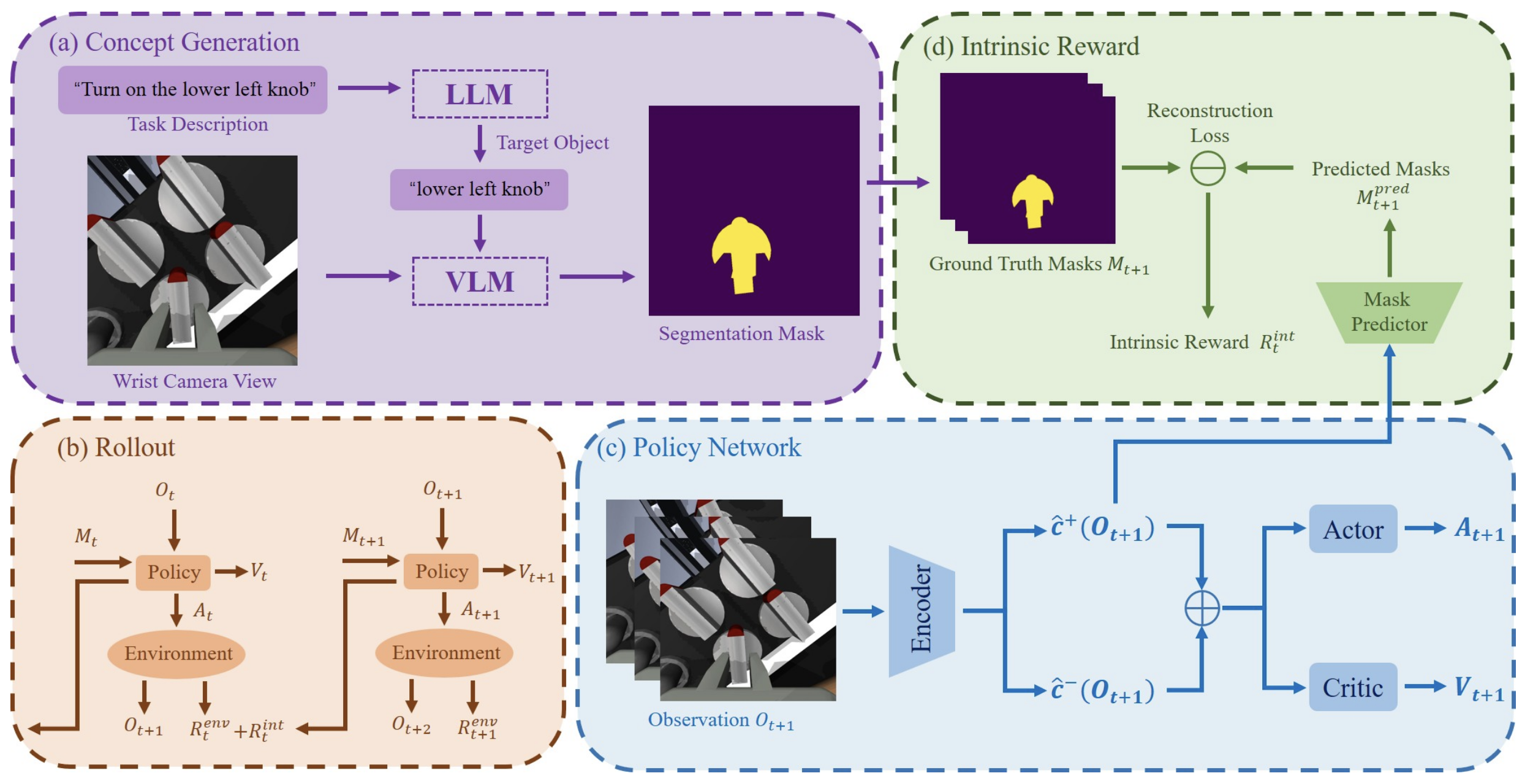 CDE: Concept-Driven Exploration for Reinforcement Learning
CDE: Concept-Driven Exploration for Reinforcement LearningIntelligent exploration remains a critical challenge in reinforcement learning (RL), especially in visual control tasks. Unlike low-dimensional state-based RL, visual RL must extract task-relevant structure from raw pixels, making exploration inefficient. We propose Concept-Driven Exploration (CDE), which leverages a pre-trained vision-language model (VLM) to generate object-centric visual concepts from textual task descriptions as weak, potentially noisy supervisory signals. Rather than directly conditioning on these noisy signals, CDE trains a policy to reconstruct the concepts via an auxiliary objective, using reconstruction accuracy as an intrinsic reward to guide exploration toward task-relevant objects. Because the policy internalizes these concepts, VLM queries are only needed during training, reducing dependence on external models during deployment. Across five challenging simulated visual manipulation tasks, CDE achieves efficient, targeted exploration and remains robust to noisy VLM predictions. Finally, we demonstrate real-world transfer by deploying CDE on a Franka Research 3 arm, attaining an 80% success rate in a real-world manipulation task.
@misc{mao2025cde, title = {{CDE}: Concept-Driven Exploration for Reinforcement Learning}, author = {Mao, Le and Liu, Andrew H. and Zabounidis, Renos and Kingston, Zachary and Campbell, Joseph}, eprint = {2510.08851}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, year = {2025}, } - arXiv
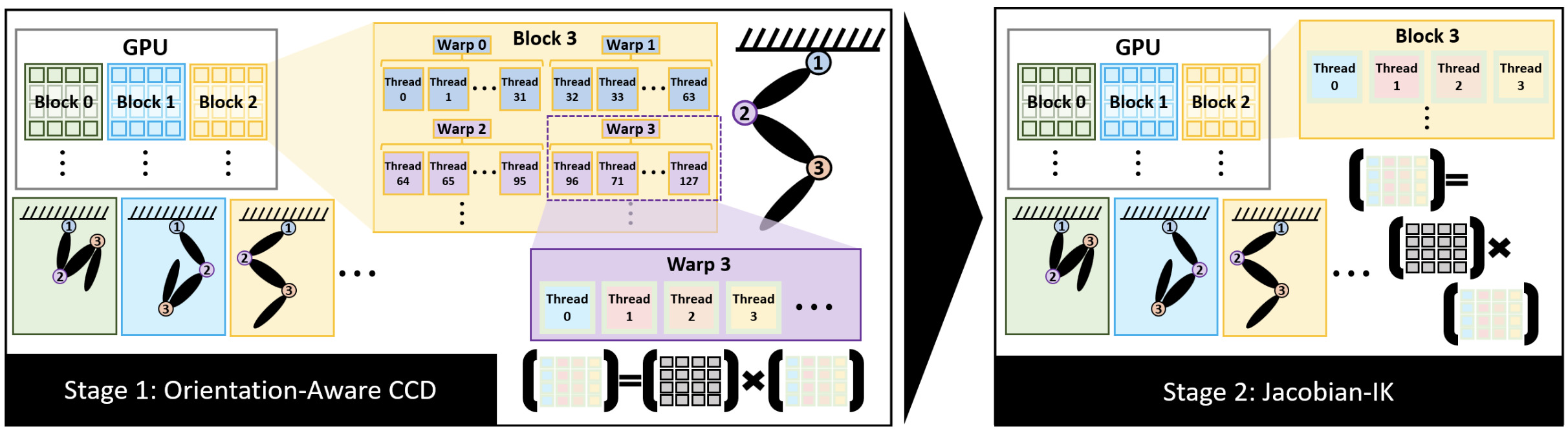 HJCD-IK: GPU-Accelerated Inverse Kinematics through Batched Hybrid Jacobian Coordinate Descent
HJCD-IK: GPU-Accelerated Inverse Kinematics through Batched Hybrid Jacobian Coordinate DescentInverse Kinematics (IK) is a core problem in robotics, in which joint configurations are found to achieve a desired end-effector pose. Although analytical solvers are fast and efficient, they are limited to systems with low degrees-of-freedom and specific topological structures. Numerical optimization-based approaches are more general, but suffer from high computational costs and frequent convergence to spurious local minima. Recent efforts have explored the use of GPUs to combine sampling and optimization to enhance both the accuracy and speed of IK solvers. We build on this recent literature and introduce HJCD-IK, a GPU-accelerated, sampling-based hybrid solver that combines an orientation-aware greedy coordinate descent initialization scheme with a Jacobian-based polishing routine. This design enables our solver to improve both convergence speed and overall accuracy as compared to the state-of-the-art, consistently finding solutions along the accuracy-latency Pareto frontier and often achieving order-of-magnitude gains. In addition, our method produces a broad distribution of high-quality samples, yielding the lowest maximum mean discrepancy. We release our code open-source for the benefit of the community.
@misc{yasutake2025hjcdik, title = {{HJCD-IK}: {GPU}-Accelerated Inverse Kinematics through Batched Hybrid Jacobian Coordinate Descent}, author = {Yasutake, Cael and Kingston, Zachary and Plancher, Brian}, eprint = {2510.07514}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, year = {2025}, } - arXiv
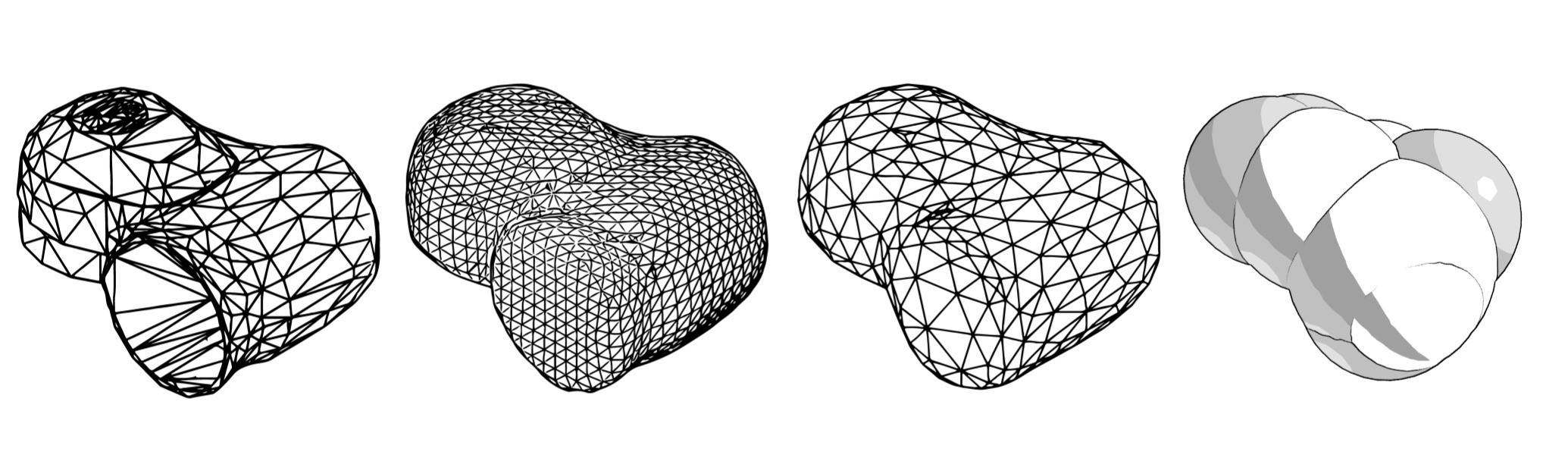 Foam: A Tool for Spherical Approximation of Robot Geometry
Foam: A Tool for Spherical Approximation of Robot GeometryMany applications in robotics require primitive spherical geometry, especially in cases where efficient distance queries are necessary. Manual creation of spherical models is time-consuming and prone to errors. This paper presents Foam, a tool to generate spherical approximations of robot geometry from an input Universal Robot Description Format (URDF) file. Foam provides a robust preprocessing pipeline to handle mesh defects and a number of configuration parameters to control the level and approximation of the spherization, and generates an output URDF with collision geometry specified only by spheres. We demonstrate Foam on a number of standard robot models on common tasks, and demonstrate improved collision checking and distance query performance with only a minor loss in fidelity compared to the true collision geometry. We release our tool as an open source Python library and containerized command-line application to facilitate adoption across the robotics community.
@misc{coumar2025foam, title = {Foam: A Tool for Spherical Approximation of Robot Geometry}, author = {Coumar, Sai and Chang, Gilbert and Kodkani, Nihar and Kingston, Zachary}, eprint = {2503.13704}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, year = {2025}, } - Workshop
 Faster Behavior Cloning with Hardware-Accelerated Motion Planning
Faster Behavior Cloning with Hardware-Accelerated Motion Planning@misc{buynitsky2025wksp, title = {Faster Behavior Cloning with Hardware-Accelerated Motion Planning}, author = {Buynitsky, Alexiy and Kingston, Zachary}, booktitle = {IEEE ICRA 2025 Workshop---RoboARCH: Robotics Acceleration with Computing Hardware and Systems}, year = {2025}, }














2024
- Scaling Long-Horizon Online POMDP Planning via Rapid State Space SamplingYuanchu Liang*, Edward Kim*, Wil Thomason*, Zachary Kingston*, Hanna Kurniawati, and Lydia E. KavrakiIn International Symposium of Robotics Research
Partially Observable Markov Decision Processes (POMDPs) are a general and principled framework for motion planning under uncertainty. Despite tremendous improvement in the scalability of POMDP solvers, long-horizon POMDPs (e.g., ≥15 steps) remain difficult to solve. This paper proposes a new approximate online POMDP solver, called Reference-Based Online POMDP Planning via Rapid State Space Sampling (ROP-RaS3). ROP-RaS3 uses novel extremely fast sampling-based motion planning techniques to sample the state space and generate a diverse set of macro actions online which are then used to bias belief-space sampling and infer high-quality policies without requiring exhaustive enumeration of the action space—a fundamental constraint for modern online POMDP solvers. ROP-RaS3 is evaluated on various long-horizon POMDPs, including on a problem with a planning horizon of more than 100 steps and a problem with a 15-dimensional state space that requires more than 20 look ahead steps. In all of these problems, ROP-RaS3 substantially outperforms other state-of-the-art methods by up to multiple folds.
@inproceedings{liang2024ropras, title = {Scaling Long-Horizon Online {POMDP} Planning via Rapid State Space Sampling}, author = {Liang, Yuanchu and Kim, Edward and Thomason, Wil and Kingston, Zachary and Kurniawati, Hanna and Kavraki, Lydia E.}, booktitle = {International Symposium of Robotics Research}, year = {2024}, } - AbstractPerception-aware Planning for Robotics: Challenges and Opportunities
In this work, we argue that new methods are needed to generate robot motion for navigation or manipulation while effectively achieving perception goals. We support our argument by conducting experiments with a simulated robot that must accomplish a primary task, such as manipulation or navigation, while concurrently monitoring an object in the environment. Our preliminary study demonstrates that a decoupled approach fails to achieve high success in either action-focused motion generation or perception goals, motivating further developments of approaches that holistically consider both goals.
@misc{meng2024icra40, title = {Perception-aware Planning for Robotics: Challenges and Opportunities}, author = {Meng, Qingxi and Quintero-Peña, Carlos and Kingston, Zachary and Unhelkar, Vaibhav and Kavraki, Lydia E.}, booktitle = {40th Anniversary of the IEEE Conference on Robotics and Automation (ICRA@40)}, year = {2024}, } - Collision-Affording Point Trees: SIMD-Amenable Nearest Neighbors for Fast Collision CheckingIn Robotics: Science and Systems
Motion planning against sensor data is often a critical bottleneck in real-time robot control. For sampling-based motion planners, which are effective for high-dimensional systems such as manipulators, the most time-intensive component is collision checking. We present a novel spatial data structure, the collision-affording point tree (CAPT): an exact representation of point clouds that accelerates collision-checking queries between robots and point clouds by an order of magnitude, with an average query time of less than 10 nanoseconds on 3D scenes comprising thousands of points. With the CAPT, sampling-based planners can generate valid, high-quality paths in under a millisecond, with total end-to-end computation time faster than 60 FPS, on a single thread of a consumer-grade CPU. We also present a point cloud filtering algorithm, based on space-filling curves, which reduces the number of points in a point cloud while preserving structure. Our approach enables robots to plan at real-time speeds in sensed environments, opening up potential uses of planning for high-dimensional systems in dynamic, changing, and unmodeled environments.
@inproceedings{ramsey2024, title = {Collision-Affording Point Trees: SIMD-Amenable Nearest Neighbors for Fast Collision Checking}, author = {Ramsey, Clayton W. and Kingston, Zachary and Thomason, Wil and Kavraki, Lydia E.}, booktitle = {Robotics: Science and Systems}, year = {2024}, doi = {10.15607/RSS.2024.XX.038}, } - Motions in Microseconds via Vectorized Sampling-Based PlanningIn IEEE International Conference on Robotics and Automation
Modern sampling-based motion planning algorithms typically take between hundreds of milliseconds to dozens of seconds to find collision-free motions for high degree-of-freedom problems. This paper presents performance improvements of more than 500x over the state-of-the-art, bringing planning times into the range of microseconds and solution rates into the range of kilohertz, without specialized hardware. Our key insight is how to exploit fine-grained parallelism within sampling-based planners, providing generality-preserving algorithmic improvements to any such planner and significantly accelerating critical subroutines, such as forward kinematics and collision checking. We demonstrate our approach over a diverse set of challenging, realistic problems for complex robots ranging from 7 to 14 degrees-of-freedom. Moreover, we show that our approach does not require high-power hardware by also evaluating on a low-power single-board computer. The planning speeds demonstrated are fast enough to reside in the range of control frequencies and open up new avenues of motion planning research.
@inproceedings{thomason2024vamp, title = {Motions in Microseconds via Vectorized Sampling-Based Planning}, author = {Thomason, Wil and Kingston, Zachary and Kavraki, Lydia E.}, booktitle = {IEEE International Conference on Robotics and Automation}, pages = {8749--8756}, year = {2024}, doi = {10.1109/ICRA57147.2024.10611190}, } - Stochastic Implicit Neural Signed Distance Functions for Safe Motion Planning under Sensing UncertaintyIn IEEE International Conference on Robotics and Automation
Motion planning under sensing uncertainty is critical for robots in unstructured environments to guarantee safety for both the robot and any nearby humans. Most work on planning under uncertainty does not scale to high-dimensional robots such as manipulators, assumes simplified geometry of the robot or environment, or requires per-object knowledge of noise. Instead, we propose a method that directly models sensor-specific aleatoric uncertainty to find safe motions for high-dimensional systems in complex environments, without exact knowledge of environment geometry. We combine a novel implicit neural model of stochastic signed distance functions with a hierarchical optimization-based motion planner to plan low-risk motions without sacrificing path quality. Our method also explicitly bounds the risk of the path, offering trustworthiness. We empirically validate that our method produces safe motions and accurate risk bounds and is safer than baseline approaches.
@inproceedings{quintero2024impdist, title = {Stochastic Implicit Neural Signed Distance Functions for Safe Motion Planning under Sensing Uncertainty}, author = {Quintero-Peña, Carlos and Thomason, Wil and Kingston, Zachary and Kyrillidis, Anastasios and Kavraki, Lydia E.}, booktitle = {IEEE International Conference on Robotics and Automation}, pages = {2360--2367}, year = {2024}, doi = {10.1109/ICRA57147.2024.10610773}, } - Accelerating Long-Horizon Planning with Affordance-Directed Dynamic Grounding of Abstract StrategiesIn IEEE International Conference on Robotics and Automation
Long-horizon task planning is important for robot autonomy, especially as a subroutine for frameworks such as Integrated Task and Motion Planning. However, task planning is computationally challenging and struggles to scale to realistic problem settings. We propose to accelerate task planning over an agent’s lifetime by integrating learned abstract strategies: a generalizable planning experience encoding introduced in earlier work. In this work, we contribute a practical approach to planning with strategies by introducing a novel formalism of planning in a skill-augmented domain. We also introduce and formulate the notion of a skill’s affordance, which indicates its predicted benefit to the solution, and use it to guide the planning and skill grounding processes. Together, our observations yield an affordance-directed, lazy-search planning algorithm, which can seamlessly compose strategies and actions to solve long-horizon planning problems. We evaluate our planner in an object rearrangement domain, where we demonstrate performance benefits relative to a state-of-the-art task planner.
@inproceedings{elimelech2024skills, title = {Accelerating Long-Horizon Planning with Affordance-Directed Dynamic Grounding of Abstract Strategies}, author = {Elimelech, Khen and Kingston, Zachary and Thomason, Wil and Vardi, Moshe Y. and Kavraki, Lydia E.}, booktitle = {IEEE International Conference on Robotics and Automation}, pages = {12688--12695}, year = {2024}, doi = {10.1109/ICRA57147.2024.10610486}, } - Software Engineering for Robotics: Future Research Directions; Report from the 2023 Workshop on Software Engineering for RoboticsClaire Le Goues, Sebastian Elbaum, David Anthony, Z. Berkay Celik, Mauricio Castillo-Effen, Nikolaus Correll, Pooyan Jamshidi, Morgan Quigley, Trenton Tabor, and Qi ZhuInvited Contributor
@misc{Goues2024, title = {Software Engineering for Robotics: Future Research Directions; Report from the 2023 Workshop on Software Engineering for Robotics}, author = {Goues, Claire Le and Elbaum, Sebastian and Anthony, David and Celik, Z. Berkay and Castillo-Effen, Mauricio and Correll, Nikolaus and Jamshidi, Pooyan and Quigley, Morgan and Tabor, Trenton and Zhu, Qi}, journal = {arXiv preprint arXiv:2401.12317}, year = {2024}, note = {Invited Contributor} }





2023
- Robots as AI Double Agents: Privacy in Motion PlanningIn IEEE/RSJ International Conference on Intelligent Robots and Systems
Robotics and automation are poised to change the landscape of home and work in the near future. Robots are adept at deliberately moving, sensing, and interacting with their environments. The pervasive use of this technology promises societal and economic payoffs due to its capabilities - conversely, the capabilities of robots to move within and sense the world around them is susceptible to abuse. Robots, unlike typical sensors, are inherently autonomous, active, and deliberate. Such automated agents can become AI double agents liable to violate the privacy of coworkers, privileged spaces, and other stakeholders. In this work we highlight the understudied and inevitable threats to privacy that can be posed by the autonomous, deliberate motions and sensing of robots. We frame the problem within broader sociotechnological questions alongside a comprehensive review. The privacy-aware motion planning problem is formulated in terms of cost functions that can be modified to induce privacy-aware behavior - preserving, agnostic, or violating. Simulated case studies in manipulation and navigation, with altered cost functions, are used to demonstrate how privacy-violating threats can be easily injected, sometimes with only small changes in performance (solution path lengths). Such functionality is already widely available. This preliminary work is meant to lay the foundations for near-future, holistic, interdisciplinary investigations that can address questions surrounding privacy in intelligent robotic behaviors determined by planning algorithms.
@inproceedings{shome2023privacy, title = {Robots as AI Double Agents: Privacy in Motion Planning}, author = {Shome, Rahul and Kingston, Zachary and Kavraki, Lydia E.}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems}, volume = {}, number = {}, pages = {2861--2868}, year = {2023}, doi = {10.1109/IROS55552.2023.10341460}, } - Solving Rearrangement Puzzles using Path Defragmentation in Factored State SpacesIEEE Robotics and Automation Letters
Rearrangement puzzles are variations of rearrangement problems in which the elements of a problem are potentially logically linked together. To efficiently solve such puzzles, we develop a motion planning approach based on a new state space that is logically factored, integrating the capabilities of the robot through factors of simultaneously manipulatable joints of an object. Based on this factored state space, we propose less-actions RRT (LA-RRT), a planner which optimizes for a low number of actions to solve a puzzle. At the core of our approach lies a new path defragmentation method, which rearranges and optimizes consecutive edges to minimize action cost. We solve six rearrangement scenarios with a Fetch robot, involving planar table puzzles and an escape room scenario. LA-RRT significantly outperforms the next best asymptotically-optimal planner by 4.01 to 6.58 times improvement in final action cost.
@article{bayraktar2023, title = {Solving Rearrangement Puzzles using Path Defragmentation in Factored State Spaces}, author = {Bayraktar, S. Bora and Orthey, Andreas and Kingston, Zachary and Toussaint, Marc and Kavraki, Lydia E.}, journal = {IEEE Robotics and Automation Letters}, volume = {8}, number = {8}, pages = {4529--4536}, year = {2023}, doi = {10.1109/LRA.2023.3282788}, } - Object Reconfiguration with Simulation-Derived Feasible ActionsIn IEEE International Conference on Robotics and Automation
3D object reconfiguration encompasses common robot manipulation tasks in which a set of objects must be moved through a series of physically feasible state changes into a desired final configuration. Object reconfiguration is challenging to solve in general, as it requires efficient reasoning about environment physics that determine action validity. This information is typically manually encoded in an explicit transition system. Constructing these explicit encodings is tedious and error-prone, and is often a bottleneck for planner use. In this work, we explore embedding a physics simulator within a motion planner to implicitly discover and specify the valid actions from any state, removing the need for manual specification of action semantics. Our experiments demonstrate that the resulting simulation-based planner can effectively produce physically valid rearrangement trajectories for a range of 3D object reconfiguration problems without requiring more than an environment description and start and goal arrangements.
@inproceedings{lee2023physics, title = {Object Reconfiguration with Simulation-Derived Feasible Actions}, author = {Lee, Yiyuan and Thomason, Wil and Kingston, Zachary and Kavraki, Lydia E.}, booktitle = {IEEE International Conference on Robotics and Automation}, volume = {}, number = {}, pages = {8104--8111}, year = {2023}, doi = {10.1109/ICRA48891.2023.10160377}, } - Optimal Grasps and Placements for Task and Motion Planning in ClutterCarlos Quintero-Peña, Zachary Kingston, Tianyang Pan, Rahul Shome, Anastasios Kyrillidis, and Lydia E. KavrakiIn IEEE International Conference on Robotics and Automation
Many methods that solve robot planning problems, such as task and motion planners, employ discrete symbolic search to find sequences of valid symbolic actions that are grounded with motion planning. Much of the efficacy of these planners lies in this grounding—bad placement and grasp choices can lead to inefficient planning when a problem has many geometric constraints. Moreover, grounding methods such as naı̈ve sampling often fail to find appropriate values for these choices in the presence of clutter. Towards efficient task and motion planning, we present a novel optimization-based approach for grounding to solve cluttered problems that have many constraints that arise from geometry. Our approach finds an optimal grounding and can provide feedback to discrete search for more effective planning. We demonstrate our method against baseline methods in complex simulated environments.
@inproceedings{quintero2023optimal, title = {Optimal Grasps and Placements for Task and Motion Planning in Clutter}, author = {Quintero-Peña, Carlos and Kingston, Zachary and Pan, Tianyang and Shome, Rahul and Kyrillidis, Anastasios and Kavraki, Lydia E.}, booktitle = {IEEE International Conference on Robotics and Automation}, volume = {}, number = {}, pages = {3707--3713}, year = {2023}, doi = {10.1109/ICRA48891.2023.10161455}, } - Scaling Multimodal Planning: Using Experience and Informing Discrete SearchIEEE Transactions on Robotics
Robotic manipulation is inherently continuous, but typically has an underlying discrete structure, such as if an object is grasped. Many problems like these are multi-modal, such as pick-and-place tasks where every object grasp and placement is a mode. Multi-modal problems require finding a sequence of transitions between modes - for example, a particular sequence of object picks and placements. However, many multi-modal planners fail to scale when motion planning is difficult (e.g., in clutter) or the task has a long horizon (e.g., rearrangement). This work presents solutions for multi-modal scalability in both these areas. For motion planning, we present an experience-based planning framework ALEF which reuses experience from similar modes both online and from training data. For task satisfaction, we present a layered planning approach that uses a discrete lead to bias search towards useful mode transitions, informed by weights over mode transitions. Together, these contributions enable multi-modal planners to tackle complex manipulation tasks that were previously infeasible or inefficient, and provide significant improvements in scenes with high-dimensional robots.
@article{kingston2023tro, title = {Scaling Multimodal Planning: Using Experience and Informing Discrete Search}, author = {Kingston, Zachary and Kavraki, Lydia E.}, journal = {IEEE Transactions on Robotics}, volume = {39}, number = {1}, pages = {128--146}, year = {2023}, doi = {10.1109/TRO.2022.3197080}, }





2022
- Robowflex: Robot Motion Planning with MoveIt Made EasyIn IEEE/RSJ International Conference on Intelligent Robots and Systems
Nominated for Best Paper for Industrial Robotics Research for Practicality.
Robowflex is a software library for robot motion planning in industrial and research applications, leveraging the popular MoveIt library and Robot Operating System (ROS) middleware. Robowflex takes advantage of the ease of motion planning with MoveIt while providing an augmented API to craft and manipulate motion planning queries within a single program. Robowflex’s high-level API simplifies many common use-cases while still providing access to the underlying MoveIt library. Robowflex is particularly useful for 1) developing new motion planners, 2) evaluation of motion planners, and 3) complex problems that use motion planning (e.g., task and motion planning). Robowflex also provides visualization capabilities, integrations to other robotics libraries (e.g., DART and Tesseract), and is complimentary to many other robotics packages. With our library, the user does not need to be an expert at ROS or MoveIt in order to set up motion planning queries, extract information from results, and directly interface with a variety of software components. We provide a few example use-cases that demonstrate its efficacy.
@inproceedings{kingston2022robowflex, title = {Robowflex: Robot Motion Planning with MoveIt Made Easy}, author = {Kingston, Zachary and Kavraki, Lydia E.}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems}, pages = {3108--3114}, year = {2022}, doi = {10.1109/IROS47612.2022.9981698}, }

2021
- MotionBenchMaker: A Tool to Generate and Benchmark Motion Planning DatasetsConstantinos Chamzas, Carlos Quintero-Peña, Zachary Kingston, Andreas Orthey, Daniel Rakita, Michael Gleicher, Marc Toussaint, and Lydia E. KavrakiIEEE Robotics and Automation Letters
Recently, there has been a wealth of development in motion planning for robotic manipulationnew motion planners are continuously proposed, each with its own unique set of strengths and weaknesses. However, evaluating these new planners is challenging, and researchers often create their own ad-hoc problems for benchmarking, which is time-consuming, prone to bias, and does not directly compare against other state-of-the-art planners. We present MotionBenchMaker, an open-source tool to generate benchmarking datasets for realistic robot manipulation problems. MotionBenchMaker is designed to be an extensible, easy-to-use tool that allows users to both generate datasets and benchmark them by comparing motion planning algorithms. Empirically, we show the benefit of using MotionBenchMaker as a tool to procedurally generate datasets which helps in the fair evaluation of planners. We also present a suite of over 40 prefabricated datasets, with 5 different commonly used robots in 8 environments, to serve as a common ground for future motion planning research.
@article{chamzas2021mbm, title = {MotionBenchMaker: A Tool to Generate and Benchmark Motion Planning Datasets}, author = {Chamzas, Constantinos and Quintero-Peña, Carlos and Kingston, Zachary and Orthey, Andreas and Rakita, Daniel and Gleicher, Michael and Toussaint, Marc and Kavraki, Lydia E.}, journal = {IEEE Robotics and Automation Letters}, volume = {7}, number = {2}, pages = {882--889}, year = {2021}, doi = {10.1109/LRA.2021.3133603}, } - Using Experience to Improve Constrained Planning on Foliations for Multi-Modal ProblemsIn IEEE/RSJ International Conference on Intelligent Robots and Systems
Many robotic manipulation problems are multi-modal—they consist of a discrete set of mode families (e.g., whether an object is grasped or placed) each with a continuum of parameters (e.g., where exactly an object is grasped). Core to these problems is solving single-mode motion plans, i.e., given a mode from a mode family (e.g., a specific grasp), find a feasible motion to transition to the next desired mode. Many planners for such problems have been proposed, but complex manipulation plans may require prohibitively long computation times due to the difficulty of solving these underlying single-mode problems. It has been shown that using experience from similar planning queries can significantly improve the efficiency of motion planning. However, even though modes from the same family are similar, they impose different constraints on the planning problem, and thus experience gained in one mode cannot be directly applied to another. We present a new experience-based framework, ALEF , for such multi-modal planning problems. ALEF learns using paths from single-mode problems from a mode family, and applies this experience to novel modes from the same family. We evaluate ALEF on a variety of challenging problems and show a significant improvement in the efficiency of sampling-based planners both in isolation and within a multi-modal manipulation planner.
@inproceedings{kingston2021, title = {Using Experience to Improve Constrained Planning on Foliations for Multi-Modal Problems}, author = {Kingston, Zachary and Chamzas, Constantinos and Kavraki, Lydia E.}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems}, pages = {6922--6927}, year = {2021}, doi = {10.1109/IROS51168.2021.9636236}, } - HyperPlan: A Framework for Motion Planning Algorithm Selection and Parameter OptimizationIn IEEE/RSJ International Conference on Intelligent Robots and Systems
Over the years, many motion planning algorithms have been proposed. It is often unclear which algorithm might be best suited for a particular class of problems. The problem is compounded by the fact that algorithm performance can be highly dependent on parameter settings. This paper shows that hyperparameter optimization is an effective tool in both algorithm selection and parameter tuning over a given set of motion planning problems. We present different loss functions for optimization that capture different notions of optimality. The approach is evaluated on a broad range of scenes using two different manipulators, a Fetch and a Baxter. We show that optimized planning algorithm performance significantly improves upon baseline performance and generalizes broadly in the sense that performance improvements carry over to problems that are very different from the ones considered during optimization.
@inproceedings{moll2021hyper, title = {HyperPlan: A Framework for Motion Planning Algorithm Selection and Parameter Optimization}, author = {Moll, Mark and Chamzas, Constantinos and Kingston, Zachary and Kavraki, Lydia E.}, booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems}, pages = {2511--2518}, year = {2021}, doi = {10.1109/IROS51168.2021.9636651}, } - Learning Sampling Distributions Using Local 3D Workspace Decompositions for Motion Planning in High DimensionsConstantinos Chamzas, Zachary Kingston, Carlos Quintero-Peña, Anshumali Shrivastava, and Lydia E. KavrakiIn IEEE International Conference on Robotics and Automation
Nominated for Best Paper in Cognitive Robotics.
Earlier work has shown that reusing experience from prior motion planning problems can improve the efficiency of similar, future motion planning queries. However, for robots with many degrees-of-freedom, these methods exhibit poor generalization across different environments and often require large datasets that are impractical to gather. We present SPARK and FLAME, two experience-based frameworks for sampling- based planning applicable to complex manipulators in 3D environments. Both combine samplers associated with features from a workspace decomposition into a global biased sampling distribution. SPARK decomposes the environment based on exact geometry while FLAME is more general, and uses an octree-based decomposition obtained from sensor data. We demonstrate the effectiveness of SPARK and FLAME on a real and simulated Fetch robot tasked with challenging pick-and-place manipulation problems. Our approaches can be trained incrementally and significantly improve performance with only a handful of examples, generalizing better over diverse tasks and environments as compared to prior approaches.
@inproceedings{chamzas2021flame, title = {Learning Sampling Distributions Using Local 3D Workspace Decompositions for Motion Planning in High Dimensions}, author = {Chamzas, Constantinos and Kingston, Zachary and Quintero-Peña, Carlos and Shrivastava, Anshumali and Kavraki, Lydia E.}, booktitle = {IEEE International Conference on Robotics and Automation}, pages = {1283--1289}, year = {2021}, doi = {10.1109/ICRA48506.2021.9561104}, } - Finite Horizon Synthesis for Probabilistic Manipulation DomainsIn IEEE International Conference on Robotics and Automation
Robots have begun operating and collaborating with humans in industrial and social settings. This collaboration introduces challenges: the robot must plan while taking the human’s actions into account. In prior work, the problem was posed as a 2-player deterministic game, with a limited number of human moves. The limit on human moves is unintuitive, and in many settings determinism is undesirable. In this paper, we present a novel planning method for collaborative human-robot manipulation tasks via probabilistic synthesis. We introduce a probabilistic manipulation domain that captures the interaction by allowing for both robot and human actions with states that represent the configurations of the objects in the workspace. The task is specified using Linear Temporal Logic over finite traces (LTLf). We then transform our manipulation domain into a Markov Decision Process (MDP) and synthesize an optimal policy to satisfy the specification on this MDP. We present two novel contributions: a formalization of probabilistic manipulation domains allowing us to apply existing techniques and a comparison of different encodings of these domains. Our framework is validated on a physical UR5 robot.
@inproceedings{wells2021icra, title = {Finite Horizon Synthesis for Probabilistic Manipulation Domains}, author = {Wells, Andrew M. and Kingston, Zachary and Lahijanian, Morteza and Kavraki, Lydia E. and Vardi, Moshe Y.}, booktitle = {IEEE International Conference on Robotics and Automation}, pages = {6336--6342}, year = {2021}, doi = {10.1109/ICRA48506.2021.9561297}, }





2020
-
 Planning Under Manifold Constraints, Encyclopedia of Robotics
Planning Under Manifold Constraints, Encyclopedia of Robotics@inbook{kingston2020book, title = {Encyclopedia of Robotics}, author = {Kingston, Zachary}, editor = {Ang, Marcelo H. and Khatib, Oussama and Siciliano, Bruno}, pages = {1--9}, year = {2020}, doi = {10.1007/978-3-642-41610-1_174-1}, isbn = {978-3-642-41610-1}, publisher = {Springer Berlin Heidelberg}, address = {Berlin, Heidelberg}, chapter = {Planning Under Manifold Constraints}, } - Informing Multi-Modal Planning with Synergistic Discrete LeadsIn IEEE International Conference on Robotics and Automation
Robotic manipulation problems are inherently continuous, but typically have underlying discrete structure, e.g., whether or not an object is grasped. This means many problems are multi-modal and in particular have a continuous infinity of modes. For example, in a pick-and-place manipulation domain, every grasp and placement of an object is a mode. Usually manipulation problems require the robot to transition into different modes, e.g., going from a mode with an object placed to another mode with the object grasped. To successfully find a manipulation plan, a planner must find a sequence of valid single-mode motions as well as valid transitions between these modes. Many manipulation planners have been proposed to solve tasks with multi-modal structure. However, these methods require mode-specific planners and fail to scale to very cluttered environments or to tasks that require long sequences of transitions. This paper presents a general layered planning approach to multi-modal planning that uses a discrete "lead" to bias search towards useful mode transitions. The difficulty of achieving specific mode transitions is captured online and used to bias search towards more promising sequences of modes. We demonstrate our planner on complex scenes and show that significant performance improvements are tied to both our discrete "lead" and our continuous representation.
@inproceedings{kingston2020leads, title = {Informing Multi-Modal Planning with Synergistic Discrete Leads}, author = {Kingston, Zachary and Wells, Andrew M. and Moll, Mark and Kavraki, Lydia E.}, booktitle = {IEEE International Conference on Robotics and Automation}, pages = {3199--3205}, year = {2020}, doi = {10.1109/ICRA40945.2020.9197545}, } - Decoupling Constraints from Sampling-Based PlannersIn Robotics Research
We present a general unifying framework for sampling-based motion planning under kinematic task constraints which enables a broad class of planners to compute plans that satisfy a given constraint function that encodes, e.g., loop closure, balance, and end-effector constraints. The framework decouples a planner’s method for exploration from constraint satisfaction by representing the implicit configuration space defined by a constraint function. We emulate three constraint satisfaction methodologies from the literature, and demonstrate the framework with a range of planners utilizing these constraint methodologies. Our results show that the appropriate choice of constrained satisfaction methodology depends on many factors, e.g., the dimension of the configuration space and implicit constraint manifold, and number of obstacles. Furthermore, we show that novel combinations of planners and constraint satisfaction methodologies can be more effective than previous approaches. The framework is also easily extended for novel planners and constraint spaces.
@incollection{kingston2020isrr, title = {Decoupling Constraints from Sampling-Based Planners}, author = {Kingston, Zachary and Moll, Mark and Kavraki, Lydia E.}, booktitle = {Robotics Research}, editor = {Amato, N. M. and Hager, G. and Thomas, S. and Torres-Torriti, M.}, pages = {913--928}, year = {2020}, doi = {10.1007/978-3-030-28619-4_62}, isbn = {978-3-030-28619-4}, publisher = {Springer International Publishing}, address = {Cham}, }



2019
- Exploring Implicit Spaces for Constrained Sampling-Based PlanningThe International Journal of Robotics Research
We present a review and reformulation of manifold constrained sampling-based motion planning within a unifying framework, IMACS (implicit manifold configuration space). IMACS enables a broad class of motion planners to plan in the presence of manifold constraints, decoupling the choice of motion planning algorithm and method for constraint adherence into orthogonal choices. We show that implicit configuration spaces defined by constraints can be presented to sampling-based planners by addressing two key fundamental primitives, sampling and local planning, and that IMACS preserves theoretical properties of probabilistic completeness and asymptotic optimality through these primitives. Within IMACS, we implement projection- and continuation-based methods for constraint adherence, and demonstrate the framework on a range of planners with both methods in simulated and realistic scenarios. Our results show that the choice of method for constraint adherence depends on many factors and that novel combinations of planners and methods of constraint adherence can be more effective than previous approaches. Our implementation of IMACS is open source within the Open Motion Planning Library and is easily extended for novel planners and constraint spaces.
@article{kingston2019imacs, title = {Exploring Implicit Spaces for Constrained Sampling-Based Planning}, author = {Kingston, Zachary and Moll, Mark and Kavraki, Lydia E.}, journal = {The International Journal of Robotics Research}, volume = {38}, number = {10--11}, pages = {1151--1178}, month = sep, year = {2019}, doi = {10.1177/0278364919868530}, }

2018
-
 Distributed Object Characterization with Local Sensing by a Multi-Robot SystemGolnaz Habibi, Sándor P. Fekete, Zachary Kingston, and James McLurkinIn Distributed Autonomous Robotic Systems
Distributed Object Characterization with Local Sensing by a Multi-Robot SystemGolnaz Habibi, Sándor P. Fekete, Zachary Kingston, and James McLurkinIn Distributed Autonomous Robotic SystemsThis paper presents two distributed algorithms for enabling a swarm of robots with local sensing and local coordinates to estimate the dimensions and orientation of an unknown complex polygonal object, ie, its minimum and maximum width and its main axis. Our first approach is based on a robust heuristic of distributed Principal Component Analysis (DPCA), while the second is based on turning the idea of Rotating Calipers into a distributed algorithm (DRC). We simulate DRC and DPCA methods and test DPCA on real robots. The result show our algorithms successfully estimate the dimension and orientation of convex or concave objects with a reasonable error in the presence of noisy data.
@incollection{habibi2018dars, title = {Distributed Object Characterization with Local Sensing by a Multi-Robot System}, author = {Habibi, Golnaz and Fekete, S{\'a}ndor P. and Kingston, Zachary and McLurkin, James}, booktitle = {Distributed Autonomous Robotic Systems}, editor = {Gro{\ss}, Roderich and Kolling, Andreas and Berman, Spring and Frazzoli, Emilio and Martinoli, Alcherio and Matsuno, Fumitoshi and Gauci, Melvin}, volume = {6}, pages = {205--218}, year = {2018}, doi = {10.1007/978-3-319-73008-0_15}, publisher = {Springer Proceedings in Advanced Robotics}, } - An Incremental Constraint-Based Framework for Task and Motion PlanningThe International Journal of Robotics Research, Special Issue on the 2016 Robotics: Science and Systems Conference
We present a new algorithm for task and motion planning (TMP) and discuss the requirements and abstrations necessary to obtain robust solutions for TMP in general. Our Iteratively Deepened Task and Motion Planning (IDTMP) method is probabilistically-complete and offers improved performance and generality compared to a similar, state-of-the-art, probabilistically-complete planner. The key idea of IDTMP is to leverage incremental constraint solving to efficiently add and remove constraints on motion feasibility at the task level. We validate IDTMP on a physical manipulator and evaluate scalability on scenarios with many objects and long plans, showing order-of-magnitude gains compared to the benchmark planner and a four-times self-comparison speedup from our extensions. Finally, in addition to describing a new method for TMP and its implementation on a physical robot, we also put forward requirements and abstractions for the development of similar planners in the future.
@article{dantam2018tmp, title = {An Incremental Constraint-Based Framework for Task and Motion Planning}, author = {Dantam, Neil T. and Kingston, Zachary and Chaudhuri, Swarat and Kavraki, Lydia E.}, journal = {The International Journal of Robotics Research, Special Issue on the 2016 Robotics: Science and Systems Conference}, volume = {37}, number = {10}, pages = {1134--1151}, year = {2018}, doi = {10.1177/0278364918761570}, } - Sampling-Based Methods for Motion Planning with ConstraintsAnnual Review of Control, Robotics, and Autonomous Systems
Robots with many degrees of freedom (e.g., humanoid robots and mobile manipulators) have increasingly been employed to accomplish realistic tasks in domains such as disaster relief, spacecraft logistics, and home caretaking. Finding feasible motions for these robots autonomously is essential for their operation. Sampling-based motion planning algorithms have been shown to be effective for these high-dimensional systems. However, incorporating task constraints (e.g., keeping a cup level, writing on a board) into the planning process introduces significant challenges. is survey describes the families of methods for sampling-based planning with constraints and places them on a spectrum delineated by their complexity. Constrained sampling-based methods are based upon two core primitive operations: (1) sampling constraint-satisfying configurations and (2) generating constraint-satisfying continuous motion. Although the basics of sampling-based planning are presented for contextual background, the survey focuses on the representation of constraints and sampling-based planners that incorporate constraints.
@article{kingston2018ar, title = {Sampling-Based Methods for Motion Planning with Constraints}, author = {Kingston, Zachary and Moll, Mark and Kavraki, Lydia E.}, journal = {Annual Review of Control, Robotics, and Autonomous Systems}, volume = {1}, number = {1}, pages = {159--185}, year = {2018}, doi = {10.1146/annurev-control-060117-105226}, }



2017
-
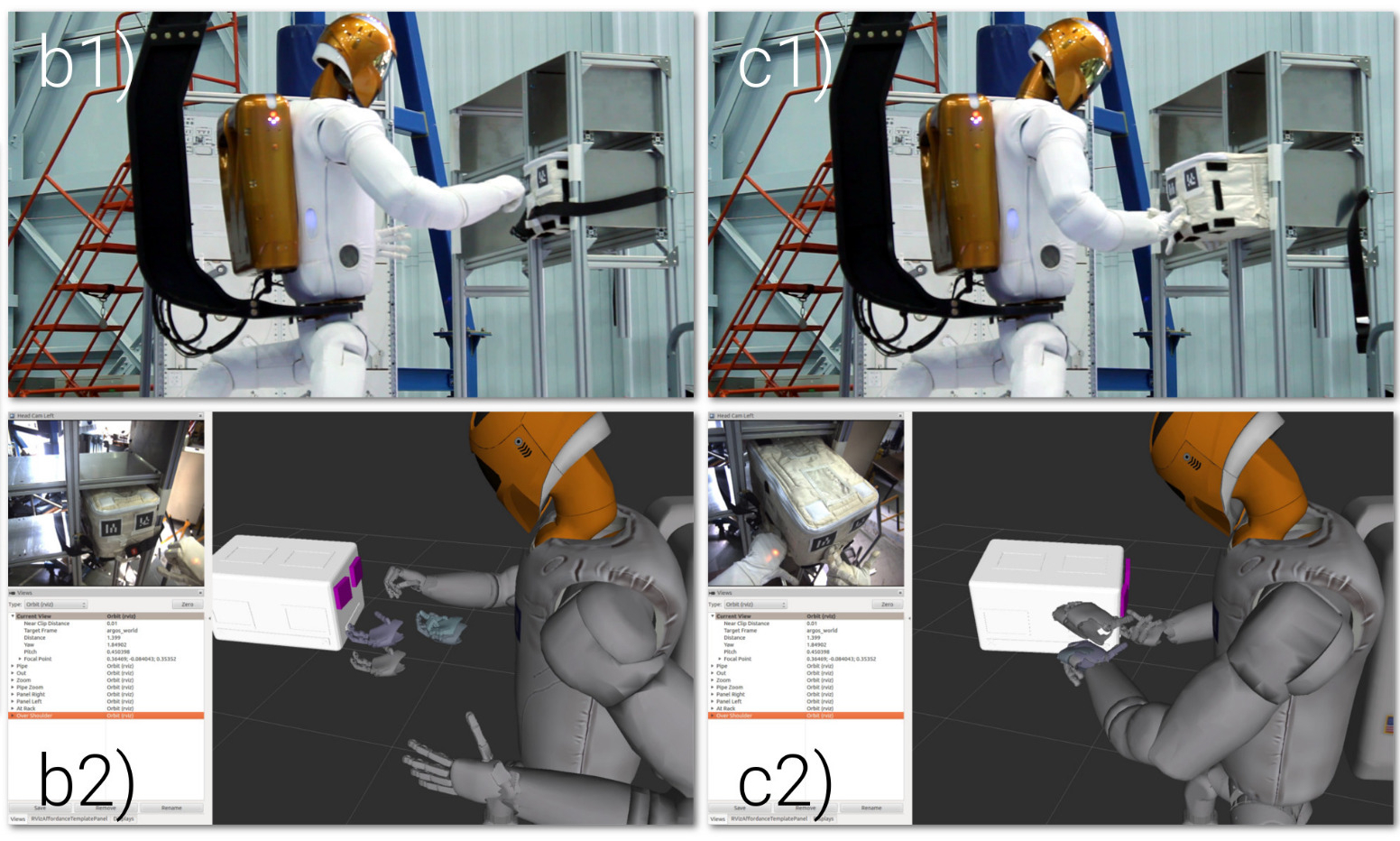 Robonaut 2 and You: Specifying and Executing Complex OperationsIn IEEE Workshop on Advanced Robotics and its Social Impacts
Robonaut 2 and You: Specifying and Executing Complex OperationsIn IEEE Workshop on Advanced Robotics and its Social ImpactsCrew time is a precious resource due to the expense of trained human operators in space. Efficient caretaker robots could lessen the manual labor load required by frequent vehicular and life support maintenance tasks, freeing astronaut time for scientific mission objectives. Humanoid robots can fluidly exist alongside human counterparts due to their form, but they are complex and high-dimensional platforms. This paper describes a system that human operators can use to maneuver Robonaut 2 (R2), a dexterous humanoid robot developed by NASA to research co-robotic applications. The system includes a specification of constraints used to describe operations, and the supporting planning framework that solves constrained problems on R2 at interactive speeds. The paper is developed in reference to an illustrative, typical example of an operation R2 performs to highlight the challenges inherent to the problems R2 must face. Finally, the interface and planner is validated through a case-study using the guiding example on the physical robot in a simulated microgravity environment. This work reveals the complexity of employing humanoid caretaker robots and suggest solutions that are broadly applicable.
@inproceedings{baker2017r2, title = {Robonaut 2 and You: Specifying and Executing Complex Operations}, author = {Baker, William and Kingston, Zachary and Moll, Mark and Badger, Julia and Kavraki, Lydia E.}, booktitle = {IEEE Workshop on Advanced Robotics and its Social Impacts}, pages = {1--8}, month = mar, year = {2017}, doi = {10.1109/ARSO.2017.8025204}, address = {Austin, TX}, }

2016
- Incremental Task and Motion Planning: A Constraint-Based ApproachIn Robotics: Science and Systems
We present a new algorithm for task and motion planning (TMP) and discuss the requirements and abstractions necessary to obtain robust solutions for TMP in general. Our Iteratively Deepened Task and Motion Planning (IDTMP) method is probabilistically-complete and offers improved performance and generality compared to a similar, state-of-the-art, probabilistically-complete planner. The key idea of IDTMP is to leverage incremental constraint solving to efficiently add and remove constraints on motion feasibility at the task level. We validate IDTMP on a physical manipulator and evaluate scalability on scenarios with many objects and long plans, showing order-of-magnitude gains compared to the benchmark planner and a four-times self-comparison speedup from our extensions. Finally, in addition to describing a new method for TMP and its implementation on a physical robot, we also put forward requirements and abstractions for the development of similar planners in the future.
@inproceedings{dantam2016tmp, title = {Incremental Task and Motion Planning: A Constraint-Based Approach}, author = {Dantam, Neil T. and Kingston, Zachary and Chaudhuri, Swarat and Kavraki, Lydia E.}, booktitle = {Robotics: Science and Systems}, month = jun, year = {2016}, doi = {10.15607/RSS.2016.XII.002}, address = {Ann Arbor, MI}, }

2015
- Humanoids
 Kinematically Constrained Workspace Control via Linear OptimizationIn IEEE-RAS International Conference on Humanoid Robots
Kinematically Constrained Workspace Control via Linear OptimizationIn IEEE-RAS International Conference on Humanoid RobotsWe present a method for Cartesian workspace control of a robot manipulator that enforces joint-level acceleration, velocity, and position constraints using linear optimization. This method is robust to kinematic singularities. On redundant manipulators, we avoid poor configurations near joint limits by including a maximum permissible velocity term to center each joint within its limits. Compared to the baseline Jacobian damped least-squares method of workspace control, this new approach honors kinematic limits, ensuring physically realizable control inputs and providing smoother motion of the robot. We demonstrate our method on simulated redundant and non-redundant manipulators and implement it on the physical 7-degree-of-freedom Baxter manipulator. We provide our control software under a permissive license.
@inproceedings{kingston2015lc3, title = {Kinematically Constrained Workspace Control via Linear Optimization}, author = {Kingston, Zachary and Dantam, Neil T. and Kavraki, Lydia E.}, booktitle = {IEEE-RAS International Conference on Humanoid Robots}, pages = {758--764}, month = nov, year = {2015}, doi = {10.1109/HUMANOIDS.2015.7363455}, } - AAMAS
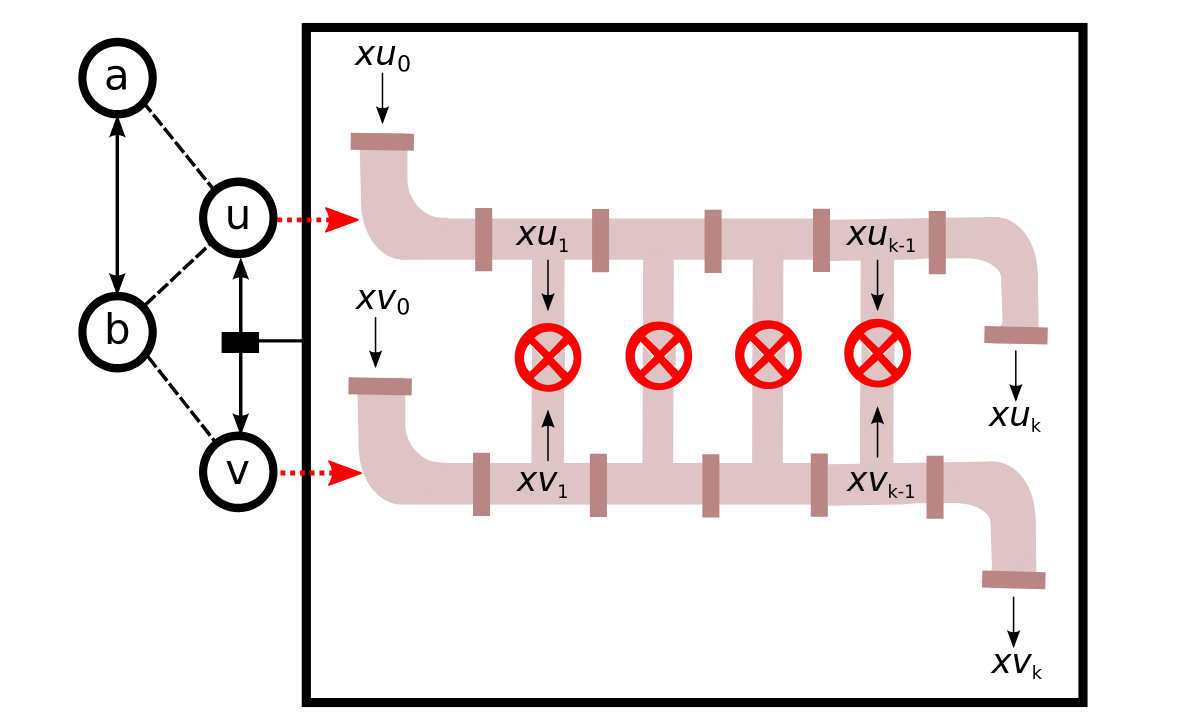 Pipelined Consensus for Global State Estimation in Multi-Agent SystemsGolnaz Habibi, Zachary Kingston, Zijian Wang, Mac Schwager, and James McLurkinIn Proceedings of the 2015 International Conference on Autonomous Agents and Multiagent Systems
Pipelined Consensus for Global State Estimation in Multi-Agent SystemsGolnaz Habibi, Zachary Kingston, Zijian Wang, Mac Schwager, and James McLurkinIn Proceedings of the 2015 International Conference on Autonomous Agents and Multiagent SystemsThis paper presents pipelined consensus, an extension of pair-wise gossip-based consensus, for multi-agent systems using mesh networks. Each agent starts a new consensus in each round of gossiping, and stores the intermediate results for the previous k consensus in a pipeline message. After k rounds of gossiping, the results of the first consensus are ready. The pipeline keeps each consensus independent, so any errors only persist for k rounds. This makes pipelined consensus robust to many real-world problems that other algorithms cannot handle, including message loss, changes in network topology, sensor variance, and changes in agent population. The algorithm is fully distributed and self-stabilizing, and uses a communication message of fixed size. We demonstrate the efficiency of pipelined consensus in two scenarios: computing mean sensor values in a distributed sensor network, and computing a centroid estimate in a multi-robot system. We provide extensive simulation results, and real-world experiments with up to 24 agents. The algorithm produces accurate results, and handles all of the disturbances mentioned above.
@incollection{habibi2015aamas, title = {Pipelined Consensus for Global State Estimation in Multi-Agent Systems}, author = {Habibi, Golnaz and Kingston, Zachary and Wang, Zijian and Schwager, Mac and McLurkin, James}, booktitle = {Proceedings of the 2015 International Conference on Autonomous Agents and Multiagent Systems}, pages = {1315--1323}, year = {2015}, doi = {10.5555/2772879.2773320}, isbn = {9781450334136}, publisher = {International Foundation for Autonomous Agents and Multiagent Systems}, } - Distributed Centroid Estimation and Motion Controllers for Collective Transport by Multi-Robot SystemsGolnaz Habibi, Zachary Kingston, William Xie, Mathew Jellins, and James McLurkinIn IEEE International Conference on Robotics and Automation
This paper presents four distributed motion controllers to enable a group of robots to collectively transport an object towards a guide robot. These controllers include: rotation around a pivot robot, rotation in-place around an estimated centroid of the object, translation, and a combined motion of rotation and translation in which each manipulating robot follows a trochoid path. Three of these controllers require an estimate of the centroid of the object, to use as the axis of rotation. Assuming the object is surrounded by manipulator robots, we approximate the centroid of the object by measuring the centroid of the manipulating robots. Our algorithms and controllers are fully distributed and robust to changes in network topology, robot population, and sensor error. We tested all of the algorithms in real-world environments with 9 robots, and show that the error of the centroid estimation is low, and that all four controllers produce reliable motion of the object.
@inproceedings{habibi2015icra, title = {Distributed Centroid Estimation and Motion Controllers for Collective Transport by Multi-Robot Systems}, author = {Habibi, Golnaz and Kingston, Zachary and Xie, William and Jellins, Mathew and McLurkin, James}, booktitle = {IEEE International Conference on Robotics and Automation}, pages = {1282--1288}, year = {2015}, doi = {10.1109/ICRA.2015.7139356}, }


